
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) ( 73 ) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (73) откуда требуемое значение постоянной времени фильтра системы АРУ будет В телефонных приемниках связи самые низкие звуковые частоты равны 100 гц. Период таких колебаний равен 0,01 сек. Поэтому в телефонных приемниках связи обычно выбирают тф = 0,02-0,2 сек. "4 изад Напряжение иа коитijpe L, С, 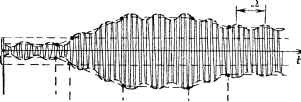 колебания несущей частоты неизменна и мала "н 1Амг}литуда колебания I несущей . частоты возрастает Амплитуда Атлитф Амплитуда колебания коле6атя\ колебания несущей \кесущей несущей частоты частоты I частоты неизменна уёыеоет. неизменна и велико I I Напряжение на нагрцзие детектора АРУ 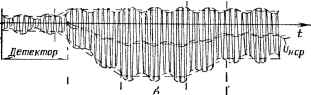 йЕд О ие работает \ Его действие задержано "I I " I Напряжение на выходе системы АРУ 12 13 Рис. 2.227. Графики физических процессов, происходящих в системе АРУ при приеме амплитудно-модулированных колебаний (глубина модуляции не постоянна) При ЭТОМ (необходимо учитывать, что для переменных токов детектора резисторы Rn и включены параллельно. В телеграфных приемниках связи тф выбирается порядка 0,1-1 сек. Таким образом, система АРУ приемников связи (и радиовещательных приемников) должна быть достаточно инерционной. Это означает, что она не должна реагировать на полезные изменения амплитуды принимаемых колебаний, происходящих с частотой модуляции. Напряжение на конденсаторе Сф должно быть пропорционально среднему уровню принимаемых колебаний, который изменяется значительно медленнее полезных изменений амплитуды. Изменение среднего уровня принимаемых колебаний (т. е. изменение амплитуды колебаний несущей частоты) происходит за счет изменения условий распространения радиоволн, а также при изменении расстояния между передатчиком и приемником. в) Система АРУ с усилением Известны два способа выполнения такой системы. В одной из них осуществляется дополнительное усиление сигнала до детектора АРУ. Следовательно, в схеме АРУ имеется каскад УПЧ. В другой системе применяют усиление управляющего напряжения. В схему такой системы входит усилитель постоянного напряжения. 3. Автоматическая регулировка усиления в радиолокационных приемниках Схемы АРУ, применяемые в приемниках радиолокационных станций, имеют специфические особенности. Объясняется это тем, что радиолокационные станции работают в импульсном режиме и поэтому полезный сигнал, отраженный от цели, воздействует на приемник в течение весьма короткого отрезка времени. В промежутке между полезными импульсами на входе приемника может действовать большое количество мешающих сигналов различного происхождения. Они часто воздействуют на приемник и во время прихода отраженных сигналов. Мешающие сигналы могут иметь значительную амплитуду и частоту, близкую к частоте настройки приемника. Они могут быть модулированные, немодулированные и иметь различную длительность. На рис. 2.228 показан пример немодулированной помехи, действующей на входе радиолокационного приемника одновременно с полезным сигналом. Там же показано результирующее напряжение на входе приемника для трех случаев. Задача борьбы с естественными помехами в радиолокационных станциях решается при помощи различных систем АРУ. Рассмотрим системы автоматической регулировки усиления, получившие широкое распространение в радиолокационных приемниках. Мгновенная автоматическая регулировка усиления (МАРУ) В приемниках радиолокационных станций часто применяется система мгновенной автоматической регулировки усиления (МАРУ). Она в основном предназначена для борьбы с импульсными помехами, имеющими большую амплитуду. Такие помехи появляются вследствие отражений от поверхности воды (если радиолокацион- ная станция установлена на самолете), холмов, плотной облачности. Такая помеха, воздействуя на приемник без системы МАРУ, вызывает перегрузку ряда его каскадов, вследствие чего наступает резкое уменьшение чувствительности приемника. Результатом этого может быть пропуск полезных сигналов. 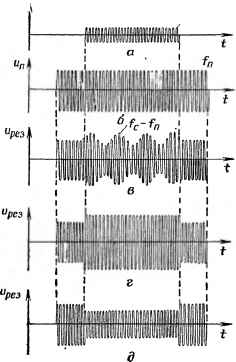 Рис. 2.228. Пример немодулированнои помехи, действующей на входе радиолокационного приемника одновременно с полезным сигналом: а - напряжение полезного сигнала; б - напряжение по-, мехи; е - результирующее напряжение, когда Ф f> г - результирующее иапряженне, когда f„=f, в <e = ff а - результирующее напряжение, когда f„=f, а <р = = 180° Система МАРУ в ряде случаев защищает приемник от длительной перегрузки. Ее основной особенностью является малая инерционность. Система МАРУ почти мгновенно срабатывает под воздействием помехи, уменьшая на время ее действия коэффициент усиления нескольких каскадов УПЧ. Сразу после исчезновения по- 793087046925 (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) ( 73 ) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) |
|
|