
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) ( 12 ) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (12) рис. 3.5 показан вид дискриминационной характеристики ЧД, из которой видно, что при малых значениях расстройки характеристику можно считать линейной и представить в виде f (ф)=чдА(о, где чд - коэффициент передачи частотного дискриминатора. Из этого выражения следует, что передаточная функция ЧД 1Учд(р)=чд. Рис. 3.4. Структурная схе.ма частотного дискриминатора Рис. 3.5. Дискриминационная характеристика частотного дискриминатора Выражение для передаточной функции справедливо в том случае, когда полоса пропускания ЧД намного шире спектра его входного сигнала, в противном случае необходимо учитывать инерционность ЧД, которая определяется постоянной времени детектора. В системах РА используются и ЧД с рассмотренными контурами, характеристики которых близки к характеристикам рассмотренного ЧД с фазовращателем. § 3.4. УГЛОВЫЕ ДИСКРИ.ИНАТОРЫ Угловые дискриминаторы (пеленгаторы) используются в системах автоматического сопровождения по направлению для измерения рассогласования между продольной осью антенны РЛС и направлением на движущуюся цель и преобразования этого рассогласования в электрическое напряжение. Различают два вида угловых дискриминаторов: с коническим сканированием диаграммы направленности (с последовательным сравнением сигналов) и моноимпульсные (с мгновенным сравнением сигналов). В дискриминаторе с коническим сравнением антенной РЛС формируется одна сканирующая (вращающаяся) диаграмма направленности, максимум которой смещен от продольной оси антенны (рис, 3.6, а). Если направле- ние на цель совпадает с продольной осью антенны ОХа> то цель облучается импульсами одной и той же мощности, поэтому амплитуда отраженных от нее импульсов будет постоянной. Если направление на цель не совпадает с продольной осью антенны, то в моменты времени, раз- 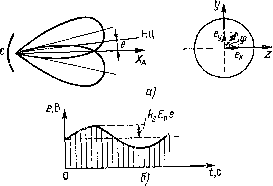 Рис. 3.6. К пояснению принципа конического ска* нирования: а - определение составляющих ошибок; б - выделение сигнала ошибок деленные интервалом времени, равном половине периода сканирования, отраженные от цели импульсы будут иметь различные амплитуды, т. е. будет осуществляться модуляция отраженного сигнала по амплитуде с частотой сканирования. При небольших отклонениях направления на цель от продольной оси антенны модуляция будет линейной: Е {() = Е,[1 + ke cos + где E(t)-амплитуда импульса, отраженного от цели и принятого в момент времени t; Eq - средняя амплитуда импульсов за период сканирования; ks - постоянный коэффициент; (Оск - частота сканирования; е - угловое рассогласование. Значение е характеризует отклонение направления на цель, а ф-знак этого отклонения. Если =0 при ф = 0 (рис. 3.6, б), то можно записать, E{t) = Egll + ke cos ф cos (Og,; t + k e sin ф sin t\. Сш-нал Eit) подается на два фазовых детектора, опорными напряжениями являются два синусоидальных на- пряжения, сдвинутых относительно друг друга на 90°. Опорные напряжения снимаются с генератора, кинематически связанного с устройством вращения диаграммы направленности так, что частота вращения диаграммы направленности и генератора опорных напряжений одна и та же. На выходе одного из фазовых детекторов возникает напряжение "Фд1 = Фд е COS ф = йуд е, на выходе другого "Фд2 = Фд е sin ф = /гуд ву, где куд-коэффициент передачи углового дискриминатора. Зависимость напряжения на выходе фазового детектора от сигнала рассогласования называется пеленгационной характеристикой дискриминатора (см. рис. 1.10, б). Передаточная функция углового дискриминатора с учетом инерционности фазового детектора в угловом дискриминаторе с коническим сканированием прием отраженных импульсов происходит последовательно через промежутки времени, равные периоду сканирования. За этот промежуток времени сигнал из-за отражающих свойств цели изменяется (флюктуирует), что приводит к снижению точности измерения угла рассогласования. В моноимпульсных угловых дискриминаторах прием отраженных от цели сигналов осуществляется одновременно четырьмя антеннами, две из которых предназначены для пеленгации цели в одной плоскости, а две другие - в другой. Так как в каждой плоскости используются по два независимых канала, то амплитудные флуктуации отраженного сигнала не влияют на точность измерения угла рассогласования. В зависимости от способа обработки принятых сигналов моноимпульсные дискриминаторы подразделяются на фазовые, амплитудные и суммарно-разностные. Ограничимся рассмотрением фазового суммарно-разностного дискриминатора. В таком дискриминаторе направление на цель определяется путем сравнения фаз сигналов, применяемых одновременно двумя антеннами. На рис. 3.7 (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) ( 12 ) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|