
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) ( 13 ) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (13) показано, как осуществляется такое сравнение, средственно из этого рисунка следует, что Непо- Ri== R + -sme, R, R - -sm e, где Ru R2 - расстояния от антенн до цели; d - расстояние между центрами антенн. Разность расстояний AR=Ri-R2= = dsine позволяет найти разность фаз Щель 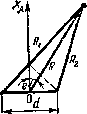 Дф = Д/? = d sin в. (3.8) где X, - длина волны. Согласно (3.8), угловое рассогласование определяется через разность фаз, принятых антеннами сигналов: 1 А,Аф е = arcsin Рис. 3.7. К пояснению фазового метода пеленгации (3.9) Формула (3.9) неоднозначна, однако это не является серьезным недостатком, если расстояние между центрами антенн выбрать не больше диаметра антенны. На рис. 3.8 показана функциональная схема фазового суммарно-разностного моноимпульсного дискриминатора. Сигналы, принятые антеннами, подаются на волновой мост (ВМ), с одного из выходов которого снимается суммарный сигнал, с другого -- разностный. Эти сигналы поступают на преобразователи частоты, состоящие из Суммарный тнм 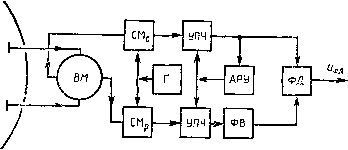 Разностный канал Рис. 3.8. Функциональная схема суммарно-разностного фазового дискрим,«натора смесителей СМс, СМр и гетеродина Г. На выходах смесителей образуются суммарный и разностный сигналы промежуточной частоты, которые усиливаются усилителями промежуточной частоты УПЧ. Для стабилизации уровней сигналов суммарного и разностного каналов в дискриминатор введено устройство автоматической регулировки усиления АРУ. "Разностное напряжение поступает на фазовый детектор ФД, опорным сигналом которого является суммарное напряжение. Для обеспечения нормальной работы ФД в разностный кагтпл включен фазовращатель ФВ. Напряжение на выходе ФД Ифд = Кфд -- ----- = «фд *" fee 1 + cos Дф fee (3.10) где kp, kc - коэффициенты усиления разностного и суммарного каналов. С учетом выражения (3.8) по (3.10) получим "Фд (е) = . Фд" / nd Sin е (3.11) 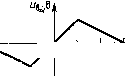 Рис. 3.9. Дискриминационная характеристика временного дискриминатора Временные дискриминаторы, предназначены для измерения временных рассогласований между отраженными от цели импульсами и зондирующими импульсами и преобразования рассогласования в пропорциональное значение напряжения. Прин- ywii т 1,5тлЬ,с цип работы временного дискриминатора рассмотрен в § 1.6. Здесь проанализируем связь выходного сигнала дискриминатора с входным сигналом, которым является временное рассогласование А/ (см. рис. 1.18). Временное рассогласование равно разности времени задержки отраженного от цели импульса tn и времени задержки следящих импульсов ta. Во временном дискриминаторе вырабатываются два импульса, длительности которых определяются выражениями (1.29). После сглаживания этих импульсов образуется усредненная разность напряжений «вдоС! -ТгУТ, (3.12) где Uo - амплитуда импульсов. Формула (3.12) справедлива при условии, что (Д/ <т/2. При !Д/)>т/2 напряжение и„„ уменьшается и пои Д?=1,5т становится равным нзлю. На рис. 3.9 показана дискриминационная характеристика временного дискриминатора. Система работает в условиях действия помех, поэтому при анализе их влияния на качественные характеристики системы необходимо учитывать нелинейную характеристику дискриминатора (см. гл. 12). § 3.5. ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА В системах РА используются различные исполнительные устройства. В системах, предназначенных для регулирования электрических сигналов, например частоты напряжений в системах АПЧ, исполнительными устройствами являются электронные приборы. В системах РА, используемых для управления механическими устройствами, например антеннами РЛС, в качестве исполнительных устройств применяются электрические двигатели постоянного и переменного тока, электромагнитные порошковые муфты и другие устройства. На рис. 3.10 показана схема двигателя, работающего на некоторую нагрузку (Н). Двигатель состоит из обмотки возбуждения ОВ, подключенной к источнику по- 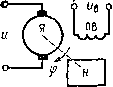 Рис. 3.10. Схема электрического двигателя постоянного тока Рис. 3. II. Регулировочная характеристика электрического двигателя стоянного тока, и обмотки якоря Я, па которую подается управляющее напряжение с усилителя мощности. Напряжение на обмотке якоря является входным сигналом двигателя, а угол поворота якоря выходным сигналом. Зависимость частоты вращения якоря Q двигателя от входного напряжения и называют регулировочной характеристикой (рис. 3.11). (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) ( 13 ) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
||||||||
|
|