
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) ( 18 ) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (18) тельно других видов сигналов. Оказывается, что пере даточная функция ошибки системы с астатизмом поряд ка V содержит множитель (имеет нуль порядка \ в точке р=0). В такой системе ошибка в установившем ся режиме равна нулю при входном сигнале x(t) =с/~ Из передаточной функции ошибки (4.14) следует, что система РА имеет порядок v астатизма, если передаточ пая функция разомкнутой системы содержит v интегри рующих звеньев (имеет полюс порядка v в точке р==0) Пример 4.1. Найти передаточные функции н ошибку в системе ФАПЧ (см. рнс. 1.8), в которой ФНЧ описывается передаточной 1 + рТг функцией Пфнч(р)=йф J . Решение. Все звенья в цепи сигнала ошибки от До до (Ог включены последовательно, поэтому где K-kiktpkyskm-коэффициент передачи системы ФАПЧ; 7фд- постоянная времени фазового детектора. Передаточная функция замкнутой системы в соответствии с выражением (4.10) (р) =-Ki}±pT р (1 + рТ,) (1 + рГфд) + /с (1 + рТг) Передаточная функция ошибки определяется по (4.13) р(1+рГ1)(1+рТфд) We (р) = Р (1 + pTi) (1 + рТфд) +к(\+ рТ) Из найденных передаточных функций следует, что система ФАПЧ имеет первый порядок астатизма, поэтому ее статическая ошибка равна нулю. Прн сигнале (Оэ=с1 ошибка определяется по (4.15): с= lira pWa (р) = - . Это выражение определяет динамическую ошибку системы ФАПЧ §4 4. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ МНОГОКОНТУРНЫХ СИСТЕМ К многоконтурным относятся системы РА, в которых помимо замкнутого контура с главной обратной связью имеются контуры, образованные стабилизирующими обратными связями, введенными для придания системе нужных динамических характеристик. Передаточные функции таких систем находятся путем последовательного сведения структурной схемы многоконтурной системы к эквивалентной одноконтурной, На рис. 4.6 изображена структурная схема двухкон-турной системы РА. Для сведения такой системы к эквивалентной одноконтурной находят передаточную функцию внутреннего контура, которая в соответствии с выражением (4.5) имеет вид x(t) 1 + (p) «0 (p) I---------- y(t) Puc. 4.6. Структурная схема двухкон-турной системы
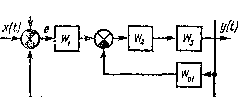 Рис. 4.7. Схемы моноконтурной системы: а - с перекрестными обратными спязями; б - с неперекресгными обратными связями После этого структурную схему системы можно представить как одноконтурную (рис. 4.6), для которой На рис. 4.7, а дана структурная схема системы с перекрестными связями. Из этого рисунка видно, что несложными преобразованиями можно структурную схему системы привести к виду, в котором перекрестные связи отсутствуют (рис. 4.7,6). После таких преобразований передаточные функции находятся по методу последовательного свертывания двухконтурной системы к одноконтурной. Передаточная функция разомкнутой системы (рис. 4.7, б) § 4.5. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ЭЛЕМЕНТОВ СИСТЕМ В ряде случаев передаточные функции и параметры устройств системы РА из-за их сложности не могут быть определены расчетным путем, поэтому приходится использовать различные экспериментальные методы. Определение характеристик как отдельных устройств, так и всей системы в целом по экспериментальным данным называют задачей идентификации. Известно большое число методов решения задачи идентификации. Выбор того или иного метода зависит от конкретных условий работы и априорных сведений о системе. В системах РА для идентификации параметров устройств широко применяют следующие методы: частотные, по переходным функциям и статистические. Частотный метод идентификации базируется на логарифмических частотных характеристиках, построенных по экспериментальным данным. В соответствии с этим методом логарифмическая АЧХ аппроксимируется прямолинейными отрезками с наклонами, кратными ±20 дБ/дек. Если характеристика до первой сопряженной частоты имеет наклон -v20 дБ/дек, то исследуемое устройство содержит V интегрирующих звеньев. Изменение наклона характеристики на какой-либо частоте на (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) ( 18 ) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|