
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) ( 36 ) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (36) § 7.4, СИНТЕЗ СИСТЕМ С НЕПОЛНОЙ ИНФОРМАЦИЕЙ О ВОЗДЕЙСТВИЯХ Ранее при динамическом синтезе систем РА полагали, что характеристики управляющих воздействий и помех известны, т. е. заданы их математические ожидания и спектральные плотности случайных составляющих. На практике это не всегда так. Характеристики воздействий обычно известны не полностью. Кроме того, они изменяются в процессе работы системы, поэтому показатели качества работы могут оказаться ниже расчетных. Построение систем РА с использованием адаптивных систем позволяет исключить зависимость показателей качества работы от изменения характеристик воздействия и нестабильности параметров устройств. Адаптивные системы анализируются в гл. 13, здесь же рассмотрим синтез робастных систем (от английского слова robust - грубый), в которых показатели качества работы можно обеспечить не ниже заданных. Техническая реализация таких систем РА по сравнению с адаптивными намного проще, что является их существенным преимуществом. Синтез робастных систем может быть выполнен различными методами [14]. Применительно к задачам синтеза систем РА целесообразно использовать метод, основанный на известных средних квадратических значениях управляющего воздействия и его производных. Данный метод не связан с конкретной формой спектральной плотности управляющего сигнала, поэтому ее изменение не приводит к несоблюдению точности работы системы РА. Рассматриваемый метод синтеза систем РА сводится к выбору частотной характеристики ощибки из условия не превышения средней квадратической ошибкой заданного значения. После этого можно сформулировать требования к частотной характеристике разомкнутой системы. Дисперсия ошибки относительно управляющего воздействия в соответствии с выражением (6.20) 02 = ех I ГЛ/«) P5co)dco<D„, (7.43) где We{j(i))-частотная характеристика ошибки; Dto - допустимое значение дисперсии ошибки. Представим квадрат АЧХ ошибки в следующем виде: I К (М ( -= Со + со + с, 0)* +... + с„ (о\ (7.44) 8-493 ИЗ Тогда дисперсия ошибки (7.43) < = 00 + с, D, + c,D, +...+ cD, (7.45) где Do -дисперсия управляющего воздействия; Oi - дисперсии производных; Ci - постоянные коэффициенты. Задача синтеза системы состоит в выборе характеристики Weija), удовлетворяющей условию (7.43). Если известна только дисперсия управляющего воздействия Do, то из вырал<ения (7.45) следует, что Cc==Deo/Do и частотная характеристика ошибки проектируемой системы должна удовлетворять условию ! (/to) I < 1 W,o (/со) I = ]/"= (7.46) где IWeo(/ft>) - АЧХ ошибки, составленная по априорным сведениям об управляющем воздействии. Таким образом, ошибка не должна превышать значения (7.46) в диапазоне частот, в котором возможны спектральные составляющие управляющего воздействия. В том случае, когда известна только дисперсия первой производной управляющего воздействия Di, то Ci - -Deo/Di и частотная характеристика ошибки проектируемой системы должна удовлетворять условию 1 We (/«) 1 < I 1.0 (М I = « У = (В . (7.47) Если известна только дисперсия второй производной управляющего воздействия, то i .(/«) ! < I WiM I = ]/~- = - (7.48) От ограничений, накладываег»1ых на АЧХ ошибки, можно перейти к требованиям, которым должна удовлетворять частотная характеристика разомкнутой проектируемой системы. Из выражений (4.10) и (4.14) следует, что lFp(/«) = W,(/«)/W.(/»). (7.49) Так как на частотах меньше частоты среза [ Wgda) \ й=1 (см. § 6.3), то условия (7.46) -(7.48) выполняются, если ! го (/«) 1 >--!-, (7.50) а ФЧХ разомкнутой системы может быть произвольной. 114 На частотах больше частоты среза jWaC/co)! - « I Wpijin) I н поэтому вид частотной характеристики разомкнутой системы не влияет на точность системы РА и может быть произвольным, но при этом требования к запасам устойчивости должны соблюдаться. Выполнение условия (7.50) гарантирует, что динамическая ошибка будет не выше заданной. Очевидно, что выражениям (7.46) и (7.50) на рис. 7.8 соответствует прямая линия, параллельная оси частот и отстоящая от нее на 20 Ig оо/оео, условиям (7.47) и (7.50) - прямая с наклоном -20 дБ/дек, которая пересекает ось абсцисс на частоте, равной ai/oeo, а условиям (7.48) и (7.50) - прямая с наклоном -40 дБ/дек, которая начинается на оси абсциссе частоты Yoq/obo - Эти прямые образуют запретную область, в которой не должна располагаться низкочастотная часть логариф- fi, мической АЧХ разомкну- „п.. ft. той проектируемой h системы РА. Частоты, со- j "f -435,%к ответствующие точкам излома запретной области, вычисляют по формулам - Рис. 7.8. ЛЧХ запретной области (0 = У aJoQ. (7.51) относительно динамической ошиб- Рассмотрим ограниче-ния на вид АЧХ разомкнутой проектируемой системы из-за действия помехи, спектральная плотность которой известна и постоянна в пределах полосы пропускания системы РА (помеха в виде белого шума). Тогда дисперсия ошибки из-за действия помехи <-nj., (7.52) где /эф-эффективная полоса пропускания системы; nn - уровень спектральной плотности белого шума помехи. Задача синтеза системы РА заключается в том, чтобы суммарная средняя квадратическая ошибка системы не превышала допустимого значения: 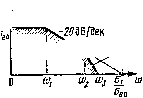 eVol+olKo,, (7.53) (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) ( 36 ) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|