
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) ( 39 ) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (39) одинаковых степенях р, найдем коэффициенты ошибок комплексной системы: cik ==CoDi + Ci Do", (7.69) C,,,=CoD, + 2C,D + C,Do; Из формул (7.69) следует, что необходимый порядок астатизма обеспечивается, если соответствующее число коэффициентов Dt равно нулю. Из этих условий и определяется выражение для передаточной функции компенсации комплексной системы. ; Подставим выражения I WAP)- -Р+-хР;-;-: (7.71) в формулу (7.67). Тогда для получения астатизма первого порядка необходимо, чтобы передаточная функция цепи компенсации ГЛр) = а/То. (7.72) Коэффициенты этой функции определим из условия = = 0. (7.73) *0 То Для получения астатизма второго порядка нужно, чтобы передаточная функция цепи компенсации r„(p)=2l£±3. (7.74) Tl Р + То Коэффициенты функции найдем из условия (7.73) при 1 То + &о Ti - «о Ci - ai gp При последовательном определении коэффициентов кередаточной функции (7.71) одни коэффициенты, например Т(, выбирают из условия обеспечения требуемых характеристик комплексной системы, а коэффициенты а,- вычисляют согласно равенства нулю соответствующих коэффициентов Di. Коэффициенты Ti передаточной функции цепи компенсации определяют инерционность цепи компенсации. Для выяснения их влияния на частотные характеристики пред- ставим передаточную функцию комплексной системы в виде «н (Р)1 (p)J (7.76) Следовательно, наличие цепи компенсации в комплексной системе эквивалентно последовательному включению с замкнутым контуром корректирующего устройства с передаточной функцией 1..(р)-1+;. (7.77) Из выражения (7.77) следует, что чем меньше инерционность цепи компенсации, тем больший опережающий эффект создается корректирующим устройством. При этом полоса пропускания комплексной системы РА относительно управляющего воздействия увеличивается. Пример 7.2. Найти передаточную функцию цепи компенсации для системы, автоматического сопровождения цели РЛС, рассмог-ренной в примере 7.1, если порядок астатизма в системе относительного Еоздействня, возникающего из-за колебаний летате.чьного аппарата, равен двум. Решение. Систему сформируем по схеме рнс. 7,12, в которой передаточные функции определяются выралениями (р) = ClP + 0 *з Р + bi р- + bip *2= 2 м; = + + 2 + *у *о-*А • Воздействие, возникающее из-за колебаний летательного аппарата, измеряется гироскопическим датчиком угловой скорости, сигнал с которого является входным сигналом цепи компенсации. Замкнутый контур рассматриваемой системы имеет первый порядок астатизма, поэтому для получения в комплексной системе астатизма второго порядка необходимо, как это следует из формул (7.69), чтобы коэффициент Do в разложении (7.67) был равен кулвд. Для этого нужно, чтобы передаточная функция цпи компенсации была реализована в соответствии с (7.74). Параметры цепи вычис-„ г, 1 То - с„ «1 . ,. ляются из условия «0=0 dc,=-г- =0. Из последнего вы- Ох То ражеиия находим, что ai = 6iTo/co. Пусть То=1, Т = 0,01с для того, чтобы полоса пропускания системы относительно воздействия, возникающего из-за колебаний летательного аппарата, была больше полосы пропускания замкнутого контура. При расчетных значениях параметров системы автоматического сопровождения, найденными в примере 7.1, передаточная функция цепи компенсации О,Ир Данная передаточная функция может быть реализована ДС-цепью и усилителем с коэффициентом усиления, равным 1 . Дальнейшее уменьшение коэффициента Ti с целью большего расширения полосы пропускания нецелесообразно, так как приводит к увеличению коэффициента усиления в цепи компенсации. На рис. 7.13 показаны АЧХ замкнутого контурй и7з(/(й) и комплексной системы W3k(/(o), из которых видно, что введение цепи компенсации расширило полосу пропускания относительно воздействия, обусловленного колебаниями летательного аппарата, до 37 с". 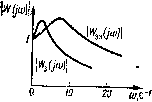 Рис. 7.13. АЧХ комплексной системы РА ВОПРОСЫ к ГЛАВЕ 7 1. Поясните постановку задачи проектирования систем РА. 2. Укажите способы включения корректирующих устройств в системах РА. 3. Опишите основные схемы, применяемые в качестве дифференцирующих устройств. 4. Каким образом формируется передаточная функция разомкнутой проектируемой си- стемы РА? 5. Как определяются передаточные функции корректирующих устройств? 6. В чем заключается синтез робастных систем РА? 7. Какие системы РА относятся к комплексным? 8. Как можно достичь повышения порядка астатизма в комплексных системах РА? ГЛАВА 8 АНАЛИЗ СИСТЕМ РАДИОАВТОМАТИКИ В ПРОСТРАНСТВЕ СОСТОЯНИЙ § 8.1. ВЕКТОРНЫЕ ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ СИСТЕМ РА Развитие высококачественных систем РА потребовало разработки новых методов их анализа и синтеза. Эти методы базируются на понятии пространства состояний. С математической точки зрения анализ систем в пространстве состояний означает использование методов матричного исчисления и векторного анализа. (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) ( 39 ) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|