
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) ( 46 ) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (46) пяя квадратическая ошибка системы (/ш) 1Гф (/ш) 1 +/СТ /0)(1+/шТ) - частотная характеристика ошиб- акт К (/о))2 Г -f /й) + /С ки системы; Wф(jш) = \/{jш) - частотная характеристика формиру- ющего фильтра сигнала; Гз(/(о)= щтш + К характеристика замкнутой системы. Оптимальное значение коэффициента усиления определим из условия (9.6), которое для рассматриваемой задачи имеет вид - частотная дК 2 Тогда оптимальный коэффициент усиле ния К opt= Vn На рис. 9.2 показаны кривые изменения составляющих средней квадратической ошибки системы РА в зависимости от коэффициента усиления для jVx=0,76-10- рад2-с; yV„ = 0,305x XlO-" рад-с; 7 = 0,1 с. 6 0,06 0,02
о 2 4 ко ку Рис. 9.2. К определению оптимального коэффициента усиления системы § 9.3. ФИЗИЧЕСКИЙ СМЫСЛ ОПТИМАЛЬНОЙ ПОЛОСЫ ПРОПУСКАНИЯ Рассмотрим систему РА с частотной характеристикой (рис. 9.3) еО при со<со„; gg О при со>а)п, Г(/ш) = где юп - ширина полосы пропускания системы РА. Если сигнал и помеха некоррелированы, то дисперсия ошибки системы с частотной характеристикой (9.8) в соответствии с выражением (6.20) «г. ((о) d(o -f -1- J (со) d(o = oL + a„, (9.9) где oe - средняя квадратическая ошибка; («) - спектральная плотность сигнала; Sn(со)-спектральная плот- ность помехи; авх -средняя квадратическая ошибка относительно сигнала; o.,, -средняя квадратическая ошибка из-за действия помехи. Из выражения (9.9) следует, что средняя квадратическая ошибка системы РА зависит от ширины полосы 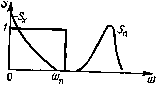 Рис. 9.3. Идеальная ЛЧХ Рис. 9.4. К определению оптимальной полосы пропускания при неперекренхиваю-щихся спектрах сигнала и помехи пропускания. Полосу пропускания системы РА, при которой средняя квадратическая ошибка принимает минимальное значение, называют оптимальной. На рис. 9.4 показаны графики спектральных плотностей сигнала и помехи. Так как эти графики не перекрываются, то оптимальная полоса пропускания системы равна граничной частоте спектра сигнала. В этом случае средняя квадратическая ошибка системы РА равна пулю, так как все сос1авляющие спектра сигнала воспроизводятся системой и ни одна составляющая спектра помехи не проходит на ее выход. Если графики спектральных плотностей сигнала и помехи перекрываются, то обе составляющие средней квадратической ошибки системы в выражении (9.9) не равны нулю. Из рис. 9.5 видно, что первая составляющая (средняя квадратическая ошибка воспроизведения сигнала) определяется той частью спектральной плотности сигнала, которая расположена за полосой пропускания системы (площадь / под графиком спектральной плотности сигнала). С расширением полосы пропускания эта составляющая ошибки уменьшается (рис. 9.6). Вторая со-С1авляющая средней квадратической ошибки системы, обусловленная помехой, зависит от той части спектральной плотности помехи, которая совпадает с полосой пропускания системы (площадь 2 на рис. 9.5). С расшире- нием полосы пропускания среднеквадратическая ошибка из-за действия помехи увеличивается (рис. 9.6). Оптимальная полоса пропускания системы РА соответствует минимальной среднеквадратической ошибке. Для ее вы- 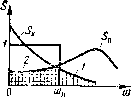 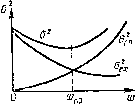 Рнс. 9.5. К пояснению оптимальной полосы пропускания системы РА Рис. 9.6. Зависимость средней квадратической ошибки системы РА от Ып числения продифференцируем выражение (9.9) по полосе пропускания Ып и полученный результат приравняем нулю. В результате получим 1 „ , . , 1 (9.10) Из этого выражения следует, что оптимальная полоса пропускания системы - это частота, на которой выполняется равенство 5Л«по) = 5п(ш„„). (9. И) Так как частотные характеристики систем РА отличаются от идеальной характеристики (9.8), то оптимальная полоса пропускания, найденная из выражения (9.11), получается приближенной. Как показывает практика, ошибки при этом не превышают 10-20 %. Минимум суммарной средней квадратической ошибки системы определяется не только полосой пропускания, но и видом ее частотной характеристики. Поэтому в обшем случае синтез системы заключается в нахождении ее оптимальных частотных характеристик из условия минимума суммарных средних квадратических ошибок при заданных статистических характеристиках сигнала и помехи. § 9.4. СИНТЕЗ ОПТИМАЛЬНЫХ СИСТЕМ Сформулируем постановку задачи синтеза оптимальных систем. На вход проектируемой системы действуют (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) ( 46 ) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|||||||||||||||||||||
|
|