
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) ( 48 ) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (48) чески нереализуемой неустойчивой системе. Дальнейший синтез оптимальной системы сводится к определению реализуемой оптимальной частотной характеристики, наиболее близкой к полученной нереализуемой (9.24). Реализуемая оптимальная частотная характеристика определяется выражением (/0)) = 5а/ Ы (9.28) (/«) (- М . где операция [...]+ означает выделение слагаемых, полюсы которых на плоскости комплексного переменного p=j(a расположены слева от мнимой оси. В случае, часто встречающемся в инженерной практике, когда функция (929) является дробно-рациональной функцией относительно частоты, выделение слагаемых с полюсами, расположенными слева от мнимой оси, осуществляется путем разложения (9.29) на простые дроби: Sxf (м) а, = (О - а> - <х)1 (9.30) (9.31) h - полюсы выражения (9.29). Дисперсия ошибки в системе с частотной характеристикой (9.28) будет больше значения, определяемого по выражению (9.27) и найденного без учета физической реализуемости оптимальной системы. Однако среди реализуемых устройств система РА с характеристикой (9.28) обеспечивает наименьшее значение среднеквадратической ошибки выделения сигнала из его смеси с помехой. Согласно (9.28), передаточная функция оптимальной проектируемой системы W,{p) = W,iH\.. (9,32) Тогда передаточная функция последовательного корректирующего устройства, включаемого в цепь сигнала ошибки, WAp)-WpJp)Wp„{p). (9.33) где IFpo(p)-передаточная функция разомкнутой оптимальной системы; lFp„ (р) - передаточная функция исход- ной части, составленная из функционально необходимых устройств системы. Если для коррекции используется стабилизирующая обратная связь, то передаточную функцию цепи обратной связи можно вычислить по формуле (7.24) с учетом (9.33). Пример 9.2. Найти передаточную функцию последовательного корректирующего устройства в оптимальной системе автоподстройки частоты, структурная схема которой показана на рис. 1.6, для случая, когда спектральные плотности сигнала и помехи определяются выражениями Sx (ш) = , -, 5п (ш) = Л?„. (9.34) Решение. Инроционностью усилителя и дискриминатора системы пренебрегаем. Тогда передаточная функция исходной части системы автоподстройки частоты 1ри(р)=-, (9.35) где fr - постоянная времени гетеродина; Кри - КаКуКт. Спектральная плотность смеси сигнала с помехой 5у(«) = 5Л«) + 5п(ш) = 51±» , (9.36) ,2 2 де B = yV-f УУ„; Т = Т Таким образом, В соответствии с выражением (9.28) (9.37) Wo (/(О) = ф (/ш) «1 . «2 + Nx l+jwTx l-/a)ToJ 1 «1 Nx (9,38) г15(/(о) 1-f/шГ y-Q По методу неопределенных коэффициентов ai = r../(T + T„). (9.39) В соответствии с (9.38) и (9.39) оптимальная частотная характеристика проектируемой системы автоподстройки частоты где Ко = «1 - . Для наглядности выразим параметры оптимальной частотной характеристики через коэффициент, равный отношению уровней спектральной плотности сигнала и помехи. В результате получим (9.41) где р=Лх/Лп. На рис. 9.7 показаны зависимости коэффициента усиления Ка и постоянной времени Го от коэффициента р, из которых видно, что с увеличением р постоянная времени оптимальной системы уменьшается (ее предельное значение равно нулю), а коэффициент усиления растет (его предельное значение равно единице). Таким образом, при отсутствии помехи оптимальная система является безынерционным звеном (дисперсия ошибки равна нулю). Дисперсию суммарной ошибки в оптимальной системе автоподстройки частоты определим по формуле (6.20): [ I \ (jw) rs,c(o))-f I Г(,(/а)) I ?Sn(a)))d(B = То-(1-Ко)Гх 2Tx (Го+Г«) Принимая во внимание введенное обозначение р. 2TxVl+P (9.42) Вычислим дисперсию ошибки по формуле (9.27): 2 ос 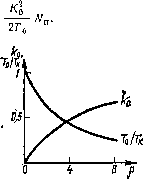 Рис. 9.7. Зависимость оптимальных параметров системы от отношения сигнал/шум Полученное значение меньше дисперсии ошибки, рассчитанной по оптимальной частотной характеристике. Это объясняется тем, что формула (9.27) найдена без учета физической реализуемости системы. Передаточная функция разомкнутой оптимальной системы авто подстройки частоты «7ро(Р)=- 1 + рТ где Кро=Ко/{1-Ко): Т=ТоЦ1-Ко). Передаточнаи функция последовательности устройства в соответствии с выражением (9.33) корректирующего йк (Р) = 1+рТ (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) ( 48 ) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|