
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) ( 49 ) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (49) где а и - Хро/Хрк - коэффициент передачи корректирующего устройства. Корректирующее устройство в оптимальной системе автоподстройки частоты включают между усилителем и дискриминатором, оно может быть реализовано RC-lxeпъю с отставанием по фазе. В заключение отметим, что при нестационарных воздействиях оптимальная система оказывается нестационарной, определение оптимальной переходной функции которой является сложной задачей. Поэтому при проектировании нестационарных оптимальных систем метод Винера не применяется. Решение нестационарных задач проектирования систем РА базируется на оптимальных фильтрах Калмана (см.гл. 11). ВОПРОСЫ К ГЛАВЕ 9 1. Поясните постановку задачи синтеза оптимальных систем РА. 2. Поясните физический смысл оптимальной полосы пропускания системы РА. 3. Каким образом вычисляются значения оптимальных пара- метров систем РА из условия минимума средней квадратической ошибки? 4. Поясните постановку задачи оптимальной фильтрации Винера и условие физической реализуемости оптимального решения. ГЛАВА 10 ЦИФРОВЫЕ СИСТЕМЫ РАДИОАВТОМАТИКИ § 10.1. ОБЩИЕ СВЕДЕНИЯ. СТРУКТУРНАЯ СХЕМА ЦИФРОВОЙ СИСТЕМЫ Возрастание требований к качеству работы систем РА, увеличение объема перерабатываемой информации, усложнение объектов управления привело к тому, что средствами аналоговой техники и непрерывной автоматики нельзя решить многие практические задачи. В результате в современных радиотехнических устройствах и системах радиоуправления стали широко использовать цифровые системы РА, в состав которых входят ЦВМ или специализированные цифровые устройства. Быстрое внедрение в технику цифровых систем объясняется тем, что они по сравнению с аналоговыми имеют значительно большие вычислительные возможности. В цифровых системах, выполненных на базе микроэлектроники (инте- гральиых схемах, микропроцессорах и мини-ЭВМ), при небольших массах и габаритах можно использовать более сложные алгоритмы обработки сигналов. При этом точность реализации алгоритмов определяется только периодом дискретизации, числом разрядов цифровых кодов и может быть сделана весьма высокой. Важным преимуществом цифровых систем является высокая стабильность их работы, в таких системах РА отсутствует дрейф нуля дискриминаторов и других цифровых устройств систем. Кроме того, в цифровых системах просто осуществляется перестройка их структуры и регулировка параметров. В радиотехнических устройствах и системах радиоуправления цифровые системы применяются для стабилизации частоты, измерения дальности, управления антеннами РЛС, для формирования команд управления различными объектами. Для обработки сигналов в РЛС широкое применение нашли цифровые фильтры, реализуемые на устройствах цифровой техники: сумматорах, регистрах и г. п. Подобные фильтры используются и в качестве корректирующих устройств в различных системах РА. Цифровые фильтры позволяют избавиться от применения ЦВМ, что упрощает и снижает стоимость систем РА. На рис. 10.1 показана типовая структурная схема цифровой системы РА, которая состоит из преобразова- Г" x(tj
y(t) Рис. 10.1. Типовая структурная схема цифровой системы РА телей информации непрерывных сигналов в код (НК), цифровой вычислительной машины (ЦВМ), обратного преобразователя (КН), осуществляющего преобразование кода в непрерывный сигнал, и непрерывного объекта управления (ОУ). в процессе преобразования непрерывных сигналов xii) и y(i) в цифровые x{t) и y{t) происходит дискретизация этих сигналов, т. е. осуществляется выборка непрерывных сигналов, соответствующих дискретным моментам времени (обычно выборка производится через равные промежутки времени Т). Дискретность ввода сигналов обеспечивается импульсным элементом (ИЭ). В процессе преобразования сигналов в цифровую форму происходит также их квантование по уровню. В результате из всех возможных дискретных сигналов выбираются только разрешенные уровни, кратные шагу квантования, равного значению младшего разряда ЦВМ. Если преобразователь НК имеет а разрядов, то число уровней квантования, отличных от нуля, составляет 2°-1. От преобразователей НК сигналы поступают на ЦВМ, в которой реализован алгоритм управления системы. Для преобразования этого сигнала в непрерывный введен преобразователь КН, на 7-*j- выходе которого получают сигнал ыг(0. под действием которого регулируется режим работы объекта управления системы РА. Квантование сигналов по уровню - это нелинейная операция, поэтому цифровые системы относятся к классу нелинейных. Сигнал, квантованный по уровню, можно представить в виде (рис. 10.2) 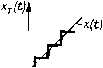 Рис. 10.2. К пояснению процесса квантования сигнала по уровню xAt) = x(t) + AJt), (10.1) где x{t) - неквантованный сигнал; Ax{t) -шум квантования. Число разрядов преобразователей информации обычно выбирается равным 8-15, при этом число уровней квантования сигналов велико, что позволяет во многих случаях пренебречь нелинейностью характеристик. При необходимости влияние шума квантования на качество работы системы РА можно учесть путем введения дополнительного сигнала Axit). Цифровые системы из-за дискретизации в них сигналов по времени относятся к дискретным. Дискретизация (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) ( 49 ) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|||||||||||||||||
|
|