
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) ( 58 ) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (58) Решение. Характеристическое уравнение дальномера: 2-1 + +ЙГ=0. Условие устойчивости: lzi\ = \l-kT\<l или k<~ , Расположение корней характеристического уравнения (10.70) внутри круга единичного радиуса соответствует расположению корней на плоскости комплексного переменного р слева от мнимой оси в полосе ±п/Т, которое не может быть проверено ни одним из критериев, используемых для оценки устойчивости непрерывных систем РА. Однако если с помощью подстановки (10.38) в уравнении (10.70) перейти к комплексной плоскости s (см. рис. 10.14), то областью устойчивости оказывается вся левая полуплоскость и для оценки расположения корней на плоскости s могут быть использованы критерии устойчивости, разработанные для непрерывных систем РА. Так, для проверки устойчивости цифровой РА по критерию Гурвица необходимо от характеристического уравнения (10.70) перейти к уравнению 14.гр(5) = [1+гр(2) + ...+ &о = 0- (10.71) Так же как и в непрерывных системах, нужно составить матрицу Гурвица: bi-u bi-z, bi-5,, о, Ь; Ь &; 3,. Условия устойчивости при &(>0 0 - А2 = >0,..., Д/ !>0. Если хотя бы один из определителей меньше или равен нулю, то цифровая система неустойчива. Условие Дг !=0 определяет границу устойчивости, из этого уравнения находится критический коэффициент. Пример 10.9. Оценить условия устойчивости для цифровой системы, передаточная функция которой в разомкнутом состоянии Wp (г) = кТ- (1-е-Р)г (г 1)(г-е-1*) (10.72) Решение. Характеристическое уравнение системы В соответствии с (10,70) и (10.72) a2z2-f aiz-fa, = 0, гдеаг=1; = kT (l - е-) - I - е-\ «о = е". Характеристическое уравнение (10.71) принимает вид ftjs + ftis-f 6е = 0, где 62=02-ai + au 61 = 203-2flo; &o=fli2+fli+0. Условия устойчивости: *2 = 2 (1 - е-Р) - кТ(1 - е-Р) t>- 0; = 2 (1 - е-) > 0; *„ = JfeT(l-e-P)>0. Так как е~<1, то второе и третье условия устойчивости выполняются при любых коэффициентах А и р, а первое только в том случае, когда Т 1 е-Р Если в выражении (10.73) поставить знак равенства, то получим уравнение для границы устойчивости. Устойчивость цифровых систем РА может быть оценена и по частотным критериям устойчивости. Так, для оценки устойчнвосги по критерию Найквиста нужно построить годограф частотной характеристики разомкнутой системы относительно круговой частоты или относительно псевдочастоты на основе s-преобразования (10.39). В том и другом случае цифровая система, устойчивая в разомкнутом состоянии, устойчива и в замкнутом, если годограф частотной характеристики разомкнутой системы не охватывает точку с координатами [-1, /0]. Близость системы к границе устойчивости определяется запасами устойчивости. Запас устойчивости по усилению вычисляется на критической частоте, на которой ФЧХ разомкнутой системы равна -л: 1 " ~ I Пр (/»ир) I где Юкр - критическая частота. Запас устойчивости по фазе рассчитывается на частоте среза: Дф = л-f Фр(юр), где соср - частота среза. Пример 10.10. Определить, используя критерий устойчивости Найквиста, критический коэффициент усиления в цифровой систе- ме, передаточная функция которой в разомкнутом состоянии i-e-P Wp iz) = h-- г - e Решение. Разомкнутая система устойчива, так как ее полюс г, = е-"••< 1. На рис. 10.17 построен годограф частотной характеристики разомкнутой системы, из которого видно, что 0)1(Р=я/7. Критический коэффициент найдем из условия Wp(/o)Kp) =-1. В результате получим 1 -Ь е-Р 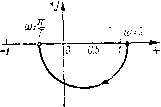 Рис. 10.17. Годограф частотной характеристики разомкнутой системы ! - е-Р § 10.9. СИНТЕЗ ЦИФРОВЫХ СИСТЕМ Синтез цифровых систем РА сводится к выбору цифрового корректирующего устройства, последовательное включение которого с объектом управления позволяет получить систему с желаемыми характеристиками (рис. 10.18), Рассмотрим синтез разомкнутой цифровой систе- x*ltl т Wlp) y*(t) Рис. 10.18. Структурная схема системы с последовательным корректирующим устройством мы, импульсная переходная функция которой должна соответствовать импульсной переходной функции заданного аналогового эквивалента, т.е. а)ц(«7) =aya (О (=пг. Желаемая передаточная функция проектируемой системы при таком методе синтеза определяется как Z-преобразование импульсцЬй переходной функции аналогового эквивалента: (10.74) 181 KH,(2) = ZK(01. (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) ( 58 ) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|