
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) ( 62 ) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (62) Составляющие ошибок округления результатов умножения входного сигнала на коэффициент ЛI 9? 1 О01 = 12 l-z\ на значение полюса Z\ О02 = 12 \-z\ u(nTJ.eJnT) 3 12 Рис. 10.24. К оценке средней квадратической ошибки цифрового фильтра параллельной формы Аналогично для второй части структурной схемы найдем, что Ооз = 12 \-zl О04 = 12 \-й Дисперсия суммарной ошибки из-за округления результатов умножения в цифровом фильтре, выполненного по параллельной канонической форме (10.89) 9 i2 Г l-z; Отметим, что если коэффициенты л1 и Ло умножить на сигналы У\{пТ) и у2{пТ), то дисперсия из-за округле- ния операции умножения т. е. меньше значения (10.89). Это обстоятельство нужно учитывать при технической реализации цифровых фильтров. Третьим видом ошибок в цифровых фильтрах является округление коэффициентов передаточной функции фильтров, связанное с ограниченным числом разрядов регистров фильтра, в результате чего коэффициенты передаточной функции оказываются отличными от расчетных. Это ведет к изменению полюсов фильтра, что и является причиной возникновения ошибок. Небольшую чувствительность изменению значений полюсов имеют фильтры, выполненные по прямой форме, причем степень чувствительности возрастает по мере роста порядка передаточной функции фильтра. По этим причинам цифровые фильтры следует выполнять по последовательной или параллельной канонической форме. § 10.11. ИМПУЛЬСНЫЕ СИСТЕМЫ Системы РА, в которых сигналы преобразуются в последовательность импульсов, называют импульсными. В таких системах длительность импульсов обычно не равна периоду их следования. Наиболее широко применяются системы, в которых генерируются импульсы постоянной длительности с амплитудой А (пТ), пропорциональной входным сигналам в дискретные, равноотстоящие друг от друга моменты времени х(пТ) (рис. 10.25, а). Подобный процесс преобразования называют амплитудно-импульсной модуляцией с коэффициентом амплитудной модуляции кл=А (пТ) /х (пТ). 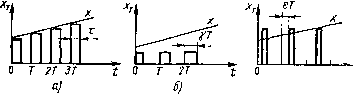 Т 2т 37 t в) Рис. 10.25. Виды импульсной модуляции: я - амплитудная; 6 - широтная; в - время-импульсная Если импульсный элемент преобразует непрерывный сигнал в последовательность импульсов с постоянной амплитудой длительностью х{пТ), пропорциональной дискретным значениям входного сигнала, то имеет место ши-ротно-импульсная модуляция (рис. 10.25, б) с коэффициентом преобразования (пТ)/х(пТ). Импульсный элемент, который генерирует импульсы постоянной амплитуды и длительности, но сдвинутых относительно дискретных моментов времени на значение е{пТ), пропорциональное дискретным значениям входного сигнала, осуществляет время-импульсную модуляцию (рис. 10.25, в) с коэффициентом кв = г{пТ)/х{пТ). Наибольщее распространение нашли импульсные системы с амплитудно-импульсной модуляцией, для анализа и синтеза которых могут быть использованы рассмотренные методы исследования цифровых систем РА. Импульсный элемент также можно представить в виде последовательного соединения дискретизатора и экстраполятора, передаточная функция которого аналогична выражению (10.5): э(р) = -М-- где Y=T/r -скважность работы импульсного элемента; т, Г - длительность и период следования импульсов. Проиллюстрируем особенности анализа импульсных систем РА. Рассмотрим импульсную систему автоподстройки частоты, которая иашла широкое применение в различных радиотехнических устройствах. Передатчики, собранные по такой схеме, используются в системах радиосвязи и радиолокации. Функциональная схема системы изображена на рис. 10.26, а. Автогенератор системы (АГ) работает в импульсном режиме и обеспечивает необходимую мощность колебаний. Стабилизацию частоты колебаний обеспечивает маломощный эталонный генератор (ЭГ), а импульсный режим работы системы автоподстройки частоты - импульсный модулятор (ИМ). Перестройка частоты автогенератора осуществляется управляющим элемен- 1>. Рис. 10.26. Импульсная система автоподстройки частоты; о - функциональная схема; б - структурная схема (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) ( 62 ) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|||||||||||||
|
|