
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) ( 67 ) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (67) дит к приращению фазы сигнала ЦПГ на За п интервалов работы системы фаза сигнала ЦПГ Фццг(«Л = - У.гСтГ). Z-преобразование последнего выражения позволяет получить / \ 2л; 1 , V Фцпг(г) =--г•(г), Яд г - 1 отсюда передаточная функция ЦПГ где йцпг=2л/Пд. При большом числе уровней днкриминационную характеристику ЦФД можно приближенно заменить линейной зависимостью и записать в виде «„ = й„Аф, (10.90) где йд=1 /А«д; Амд - шаг квантования. Влияние квантования на качество работы можно учесть, как это делалось ранее, путем дополнительного сигнала - шума квантования (10.1). При малом числе уровней квантования замена нелинейной характеристики ЦФД линейной (10.90) неточна. Однако если система ЦФАП работает в условиях действия помех, то нелинейная дискриминационная характеристика ЦФД может быть заменена линейной, крутизна которой определяется методом статистической линеаризации (см. гл. 12). При этом передаточную функцию ЦФД можно представить в виде W(z) =кд,. Оценим устойчивость системы ЦФАП для случая, когда передаточная функция цифрового фильтра нинших частот Й7ф(г)=1+;. (10.91) Фильтр с передаточной функцией (10.91) позволяет обеспечить астатизм второго порядка, а также необходимый уровень фильтрации помех. На рис. 10.40 приведена структурная схема ФАПЧ, согласно которой передаточная функция разомкнутой системы (г-1)? В соответствии с критерием устойчивости Гурвица система ЦФАП устойчива, если выполняется условие 1>Й1>2-4йдцпг. Коэффициент передаточной функции Рис. 10.40. Структурная схема цифровой ФАПЧ ЦФНЧ k\ выбирается из условия получения нужного характера переходного процесса в виде частотной характеристики системы ЦФАП. При Й1>йдйцпг/4 полюсы системы - комплексно-сопряженные, поэтому переходный процесс имеет колебательный характер и относительно ошибки в соответствии с (10.46) имеет вид Ф (пТ) = [ I ?i I sin 0 (rt + 1) - sin Qn], P где 0 = arctg p/a - модуль и аргумент комплексно-сопряженных полюсов системы; а, р - действительная и мнимая части полюсов системы. На рис. 10.41 показан график переходного процесса в системе ЦФАП, а на рис. 10.42 - частотная характери- 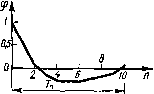 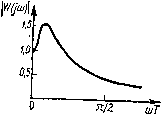 Рис. 10.41. Переходный процесс в системе ЦФАП Рис. 10.42. Частотная характеристика цифровой ФАПЧ стика этой системы, вычислительная при fei = 0,25 и кц„г=0,5. Дискриминационная характеристика ЦФД имеет периодический характер, поэтому так же, как и в непрерывных системах, для систем ЦФАП существует значе- ; ние начальной расстройки частоты ЦПГ относительно \ частоты ЭГ, при которой возможен режим слежения час- ; тоты ЦПГ за частотой ЭГ. Максимально допустимое значение расстройки частоты называют полосой удержа- 1 ния: ©уд==2яЦдм/(Пд7). , ? § Ю.Н. ИСПОЛЬЗОВАНИЕ МИКРОПРОЦЕССОРНЫХ СРЕДСТВ В СИСТЕМАХ РА Создание микропроцессорных средств (МПС) открыло новые возможности для совершенствования систем РА, реализации в них более сложных алгоритмов управления. Внедрение МПС в РЭА различного назначения определяется в основном их быстродействием и функциональными возможностями. В настоящее время МПС применяются в системах радиосвязи, различных устройствах цифровой обработки сигналов, радиолокационных, оптимальных и адаптивных системах РА. По мере совершенствования и нарастания функциональных возможностей МПС области их применения расширяются. Микропроцессор (МП) -устройство, состоящее из одной или нескольких больших интегральных схем (БИС), выполняющих функции аналогичные процессору ЭВМ. Совместно с БИС оперативного (ОЗУ), постоянного (ПЗУ) и перепрограммируемого (ППЗУ) запоминающих устройств и другими устройствами на БИС микропроцессор образует микропроцессорный комплект (МПК), на основе которого строят вычислительные устройства различного назначения. Различают два вида вычислитель-пых устройств с использованием МПС: вычислители с устройствами управления, выполненными на комбинационных схемах, и вычислители с программными запоминающими устройствами. Микропроцессоры первого вида называют МП с фиксированным набором команд. В таких МП достигается максимальное быстродействие. Устройство управления МП второго вида реализуется программным способом, согласно которому любую операцию представляют в виде микроопераций, выполняемых за один такт работы арифметического устройства. Совокупность микроопераций образует микрокоманду, которая (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) ( 67 ) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
||||||||||||||||||||||
|
|