
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) ( 71 ) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (71) ет связь выходного сигнала системы с вектором переменных состояния. Так же как и в непрерывных, выбор переменных состояния в цифровых системах является неоднозначной операцией, т. е. векторное разностное уравнение зависит от выбранных переменных состояния. Однако все возможные векторные уравнения эквивалентны, так как описывают один и тот же динамический процесс связи выходного сигнала системы с входным. Проиллюстрируем это на конкретном примере. Пример 11.1. Найти векторное разностное уравнение для системы, дискретная передаточная функция которой г?-0,7бг-Ь 0,125 Решение. Данной передаточной функции соответствует разностное уравнение j/(n-f2)-0,75г/(п-Ь 1)-Ь0,125г/(п) =а:(п-Ь 1)-х(п). На основании выражений (11.4), (11.7) получим, что - 0,125, + 0,75 0,25 Уравнения системы в пространстве состояний получаются следующими: gi{n+l)=g2{n)+x(n); (11.8) §2 (" + 1) =- 0,1.25gi (п) + 0,75g2 (п) - 0,25а; (п), а уравнение выхода имеет вид J/(n)=gi(n). (11.9) На рис. 11.2, а изображена структурная схема рассматриваемой системы, построенная по уравнениям (11.8) и (11.9), из которой видно, что переменные состояния - это сигналы на выходах звеньев запаздывания. Представим передаточную функцию системы в виде г-0,25 ~ г-0,5 " Такой передаточной функции соответствует структурная схема, приведенная иа рис. 11.2,6. Выберем в качестве переменных состояния сигналы на выходах звеньев запаздывания. Тогда можно записать следующую систему уравнений: fi {n+l) = 0,25fi(n) + 3x(n); /(n-f 1) =0,5/з(п)-2л:(п). (11.10) В этом случае уравнение выхода имеет вид y{n)=h(n)+f («) (11.11) Перепишем выражения (11.10) и (11.11) в матричной формег F(n+l) = \pF(n) + BpX(n)i (/(n) = CF(n), /1 (n) где F(n) = L/2 in) J - вектор переменных состояния; 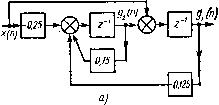 xfn) 0.25 J -2 -HRK 2" 0.5 -i Рис. 11.2. Схемы системы второго порядка: а - относительно дискрет выходного сигнала; б - относительно полюсов системы 0,25, О О, 0,5 Из уравнений (11.8) и (11.10), (11.9) и (11.11) следует, что различным переменным состояния соответствуют различные матрицы системы, управления и наблюдения, но связь выходного сигнала системы с входным остается неизменной: j/(n) = CG(n) = CF(n). Ранее цифровые системы РА в пространстве состояний описаны для стационарных систем. В нестационарных системах матрицы системы управления и наблюдения являются переменными, и векторные разностные уравнения имеют такой вид С(л+1) = А(и)0(«)4-В(/г)д;(п); (11.12) y(n)=C(n)G{n) + ho{n)x{n). (11.13) В общем случае цифровая система имеет г входов и m выходов. При этом вид векторных разностных уравнений остается таким же, как и в (11.12) и (11.13), в которых Матрица системы А имеет тот же вид, что и в системах с одним входом, и одним выходом, изменяются лищь матрицы управления и наблюдения. Матрица управления становится прямоугольной размером lydr, а матрица наблюдения имеет размер /X"- § 11 2. ДИСКРЕТНАЯ МАТРИЦА ПЕРЕХОДА Рассмотрим однородное нестационарное уравнение, которое получается из разностного векторного уравнения (11.12) при д;(п)=0: G(n+1) = A(rt)G(«). (11.14) Обозначим через G(0) начальное состояние системы. Тогда из выражения (11.14) последовательно получаем: G(1) = A(0)G(0); G(2) = A(1)G(1) = A(1)A(0)G(0); (11.15) G(n)= Г1 A(/)G(0). Введем дискретную матрицу перехода с помощью соотношения: G (я) = Ф (и, т) G (т). Дискретная матрица перехода Ф{п, т) обладает следующими свойствами: Ф(п,«) = 1; Ф(п,т) = 1Ф{т,п)]-\ где I -единичная матрица. Соотношения (11.15) через введенную дискретную матрицу перехода записывают в виде С(п) = Ф{п, O)G(O). Тогда матрица перехода имеет вид Ф(п,0)= П А(0. (11.16) (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) ( 71 ) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|