
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) ( 82 ) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (82) и дисперсии сигнала на входе нелинейного звена (в этом заключается существенное отличие статистической линеаризации от обычной). <оэффициенты статистической линеаризации, как следует из выражений (12.17) -(12.19), зависят не только от характеристик нелинейного звена, но и от закона распределения сигнала на его входе. Во многих практических случаях закон распределения этой случайной величины может быть принят гауссовским. Это объясняется тем, что нелинейные звенья в системах РА соединяются последовательно с линейными инерционными элементами, законы распределения выходных сигналов которых близки к гауссовским при любых законах распределения их входных сигналов. Чем более инерционна система, тем ближе закон распределения сигнала на выходе к гауссовскому, т. е. инерционные устройства системы приводят к восстановлению гауссовского распределения, нарушаемого нелинейными звеньями. Кроме того, изменение закона распределения в широких пределах мало влияет на коэффициенты статистической линеаризации. Поэтому полагают, что сигналы на входе нелинейных звеньев распределены по гауссовскому закону. При этом коэффициенты ко и ki зависят только от математического ожидания и дисперсии сигнала на входе нелинейного звена, поэтому для типовых нелинейных характеристик коэффициенты ко и ki могут быть заранее вычислены, что существенно упрощает расчеты систем методом статистической линеаризации. Пример 12.1. Определить коэффициенты статистической линеаризации для дискриминатора с синусоидальной характеристикой (/= -А sin ах. Решение. В соответствии с выражениями (12.17) и (12.19) -i- (1 - cos atn exp (- aa/2))- (12.20) Ha рис. 12.10, a, б изображены зависимости, вычисленные по формулам (12.20) для Л = 5, а=0,314, нз которых видно, что увеличение дисперсии входного сигнала (з\ приводит к уменьшению коэффициентов статистической линеаризации; при большом уровне помех их значения близки к нулю. Зависимости (12.20) приближенно спраиедливы и для дискриминатора с характеристикой (12.21) А sin X при - я < од; < я; О при \ ах \ >п. Выражение (12.21) часто используется для аппроксимации дискриминационных характеристик при анализе систем автоматического сопровождения цели РЛС и систем автоподстройки частоты. 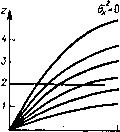 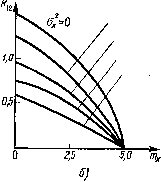 Рис. 12.10. К определению коэффициентов статистической линеаризации § 12.6. ПРИМЕНЕНИЕ МЕТОДА СТАТИСТИЧЕСКОЙ ЛИНЕАРИЗАЦИИ ДЛЯ АНАЛИЗА СТАЦИОНАРНЫХ РЕЖИМОВ И СРЫВА СЛЕЖЕНИЯ Возможность замены характеристик нелинейных звеньев линейными зависимостями позволяет при анализе нелинейных систем использовать методы, разработанные для линейных систем РА. Применим метод статистической линеаризации для анализа стационарных режимов в системе РА (рис. 12.11). Нелинейным устройством является дискриминатор с характеристикой F{e), где е~ сигнал ошибки системы. Задача анализа заключается в оценке влияния характеристик дискриминатора на точность системы и определении условий, при которых нарушается нормальная работа системы и происходит срыв слежения. При анализе точности работы системы относительно неслучайной составляющей сигнала ф() нелинейный элемент F [е) в соответствии с методом статистической линеаризации заменяется линейным звеном с коэффици- ентом передачи ko. По формуле (6.13) найдем математическое ожидание сигнала ошибки: (12.22) где WAp)==- + ko (Щ Ое) W (р) ошибки системы. - передаточная функция S>(t) n(t) r(ej W(p) !Pjt) Рис. 12.11. Структурная схема нелинейной системы РА Отметим, что математическое ожидание сигнала ошибки (12.22) имеет конечное значение, если степень медленно изменяющего сигнала ф(0 не превышает порядка астатизма системы. При анализе системы относительно случайной составляющей n{t) (помехи) нелинейный элемент заменяется линейным звеном с коэффициентом передачи ki. При этом выражение для дисперсии сигнала ошибки в соответствии с (6.20) принимает вид \+k,(meO,)W(p) 5„(©)d(o, (12.23) где Sn(©) - спектральная плотность помехи. Для определения те и о\ необходимо решить систему алгебраических уравнений (12.22) и (12.23). Для этого можно использовать метод приближенных вычислений, в соответствии с которым при каких-либо значениях Ше и а] находятся коэффициенты статистической линеаризации ко и ки после чего по формулам (12.22) и (12.23) вычисляются значения те и а и т. д. до тех пор, пока не совпадут два последовательных приближения. Уравнения (12.22) и (12.23) могут быть решены и графически. Проиллюстрируем это на конкретном примере. Пример 12.2. Найти суммарную среднюю квадратическую ошибку системы автоматического сопровождения цели (рис. 12.11). Рас- (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) ( 82 ) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|