
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) ( 94 ) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (94) формула принимает вид ифд = k, кр (1,- g) sin g -j- 2g sin (Дф -f-cos a fr7 1+g2 + 2gcos(Aq)4-t) где kp, -" коэффнцненты усиления разностного и суммарного каналов; -отношение коэффициентов усиления высокочастотных каналов; - фазовая нендентич- Суммарный канал н8> Разностный нанал Рис. 13.13. Структурная схема адаптивного пеленгатора ность высокочастотных каналов; а - фазовая неидентичность суммарного и разностного каналов. В том случае, когда g= 1 и ф=0, "Фд = tg Аф/2; к = fep cos a/fe. На рис. 13.13 показана структурная схема адаптивного пеленгатора, обеспечивающая компенсацию ошибок, возникающих из-за нендентичности суммарного и разностного каналов. Достигается это следующим образом. Измеряется ошибка отклонения сигнала на выходе пеленгатора от желаемого значения. С этой целью в состав адаптивного пеленгатора включена модель, на вход которой подается контрольный сигнал (КС), этот же сигнал подается в суммарный канал и с запаздыванием на Дф в разностный. На выходе модели по контрольному сигналу формируется желаемый сигнал пеленгатора. По измеряемой ошибке и выходному сигналу пеленгатора в устройстве адаптации (УА) создается сигнал, под дей- ствием которого изменяется коэффициент усиления разностного канала kp, за счет чего и достигается компенсация влияния нестабильности коэффициента k на точность работы пеленгатора. Определим алгоритм адаптации при цифровом способе его реализации. В качестве критерия качества работы пеленгатора примем минимум средней квадратической ошибки: 1=М[еЩ)], где еЦ)~ = «к (/) - «фд (у) «= (ko - k) tgA9/2; «„(/)-о1дАф/2. Градиент функции по коэффициенту й V/=-2e(/)tgДф/2, т.е. равен произведению ошибки и сигнала на выходе модели. Поэтому алгоритм адаптации с методом наискорейшего спуска (13.40) получается следующим: р(/+1) = р(/)+ -\-2ye(j)u„(j). На рис. 13.14 показаны графики, иллюстрирующие процессы адаптации при различных значениях нестабильности суммарного и разностного каналов. 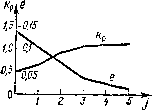 Рис. 13.14. Графики, иллюстрирующие процессы адаптации при различных значениях нестабильности суммарного и разностного каналов ВОПРОСЫ К ГЛАВЕ 13 1. Сформулируйте постановку задачи синтеза оптимальных систем. 2. Какие критерии оптимальности применяются при проектировании систем? 8. Каким образом находится оптимальное управление в задачах стабилизации и слежения? 4. Поясните принцип дуальности в оптимальных системах. 5. Какие системы относятся к адаптивным? е. Поясните принцип работы СНС с эталонной моделью. 7. Какие методы поиска используются в адаптивных системах? 8. В чем главное отличие экстремальных систем от оптимальных? 9. Перечислите типы экстремальных систем. ГЛАВА 14 МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ СИСТЕМ РАДИОАВТОМАТИКИ § 14.1. ОСНОВНЫЕ СВЕДЕНИЯ Моделирование является важным этапом проектирования систем РА. Оно позволяет провести исследования сложных систем, которые не могут быть выполнены традиционными методами. Кроме того, моделирование существенно сокращает сроки проектирования и за счет анализа большого числа вариантов системы повышает его качество. Важно отметить, что многие режимы работы систем РА могут быть исследованы только с помощью моделирования (например, оценка качества функционирования систем радиоуправления летательными аппаратами). Различают физическое, математическое и полунатурное моделирование. Физическое моделирование базируется обычно на принципе электрофизических аналогии между исследуемой системой и ее моделью в виде некоторого объекта, который описывается теми же математическими соотношениями, что и исследуемая система. В настоящее время этот метод моделирования для систем РА применяется редко. При математическом моделировании в ЭВМ. реализуются математические зависимости, описывающие процессы в системе РА, а также алгоритмы внешних воздействий, и способов оценки качества функционирования системы. При полунатуральном моделировании в состав моделирующей установки системы РА включают макеты или оригиналы отдельных подсистем или устройств реальных систем, что позволяет наиболее полно учесть влияние их характеристик на свойства исследуемой системы. Математической моделью какой-либо системы называют формализованное математическое описание системы, отражающее с требуемой точностью процессы, происходящие в исследуемой системе. При разработке математической модели можно использовать два подхода. Первый подход (аналитическое моделирование) заключается в составлении и реализации на ЭВМ алгоритмов, расчетных формул с целью анализа структуры и показателей качества работы системы: переходных процессов, частот- (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) ( 94 ) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|