
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) ( 99 ) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (99) тектора пренебрежем. В результате, согласно (4.16), передаточная функция системы ФАПЧ в разомкнутом состоянии (Р) = Начало ZSSod а,А~ 7 Применим метод дискретной аппроксимации по переходному процессу. При этом цифровой эквивалент определяется по формуле (10.76), Цифровая модель разомкнутой системы определяется дискретной передаточной функцией 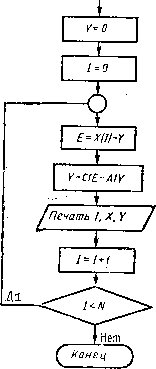 1Гр (г) = Си г- 1-ацг 1-г-1 • (14.8) ); Сп=кТ\ где eii = (72-Т*,) (1-е aii = e-P; Р = Г/Г,. Для выходного сигнала Z-преобра-зованис (частоты напряжения перегреваемого генератора) имеет вид К(г) = 1Гр(г)£(г), (14.9) где £(?) =Х(г)-К(2)--преобразование сигнала ошибки; Х(г)-Z-преобразование входного сигнала (частота сигнала с эталонного генератора). Выражению (14.9) с учетом передаточной функции (14.8) соответствует следующее разностное уравнение; y(nT)=Ciel(n-l)Tl-f OiyX Х((п-1)Г!, (14.10) где е{пТ)=х{пТ)-у{пТ); Ci = cu + ,-t-Ci2; ai = aii + l. Уравнение (14.10) является цифровой моделью системы ФАПЧ, схема алгоритма которого приведена на рис. 14.5. Следующим этапом разработки цифровой модели системы РА является составление моделей управляющих и возмущающих воздействий. Одним из возможных методов формирования модели детерминированных сигналов является табличный, в соответствии с которым в блоке памяти ЦВМ размещают массив дискретных значений Рис. 14.5. Схема алгоритма моделирования цифровой йнстемы ФАПЧ сигнала, к которому обращаются в процессе рещения задачи. Кроме того, существует метод генерирования детерминированных сигналов, основанный на математической зависимости, описывающей моделируемый сигнал (формульный метод). В этом случае возможны различные подходы к формированию модели сигнала. Од-на из них базируется на числовом решении дифференциальных уравнений, позволяющих получить нужную модель сигнала. Разработан подход, основанный на разложении детерминированного сигнала в степенной ряд, в результате чего мо- JTn ре деления °"всро-дель сигнала имеет вид рекуррент- ятности последова-ных уравнений, которые дают воз- тельности случайных можность вычислить последующий чисел сигнал по значению, найденному па предыдущем шаге вычислений. Формульный метод моделирования детерминированных сигналов более удобен по сравнению с табличным, так как требует меньший объем памяти. При моделировании случайных сигналов возможны два случая. В первом случайным является какой-либо параметр детерминированного сигнала, например амплитуда синусоидального сигнала, во втором случае моделируется случайный сигнал с заданными статистическими характеристиками. Выборку случайных значений параметра сигнала производят с помощью датчика случайных чисел, который представляет в современных ЦВМ стандартную программу, вырабатывающую последовательность случайных чисел с равномерным распределением на интервале (0.....1) (рис. 14.6). Из случайной последовательности с равномерным распределением можно сформировать последовательности с заданным распределением. Один из методов выработки случайной последовательности чисел с гауссовским распределением основывается на центральной предельной теореме, в соответствии с которой сумма независимых случайных величин xi с произвольными законами распределения и мало отличающимися диспер- сиями образует последовательность l, = Xi с законом распределения, приближающимся к гауссовскому при n->oo. На практике при п>8 и Xi, равномерно распределенных на интервале (О,..., 1), распределение последовательности g близко к гауссовскому с математическим ожиданием М[1] = п/2 и дисперсией (j=«/12. Нормированное распределение с М[1] = 0 и (т = 1 можно полу, чить с помощью алгоритма где Xi - случайные числа с равномерным распределением на интервале (О,..., I). Прип=12 =]х,-6. Моделирование случайных последовательностей с произвольными распределениями также выполняется на основе равномерного распределения чисел на интервале (О, ...,!)• Для этого используют теорему, согласно которой случайная величина х= f w{l)dl распределена рав- - 00 иомерно на интервале (О,..., 1) независимо от вида w{l). Поэтому для моделирования случайной последовательности с плотностью распределения w{l) можно решить относительно верхнего предела следующее интегральное уравнение: х,= \ w{l)dl Если при 1<1о w(l)=0, то нижний предел интегрирования можно заменить на go-Цифровая модель такого сигнала с заданной спектральной плотностью состоит из цифровой модели формирующего фильтра, частотная характеристика которого определяется выражением (6.24), и цифровой модели белого щума. Пример 14.2. Составить цифровую модель формирующего фильтра для моделирования случайного сигнала, спектральная плотность которого S V ((d) =--. Г*ш+гг«41-21)4-1 Решение. Используя выражение (6.24), найдем передаточную (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) ( 99 ) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|