
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) ( 18 ) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (18) Рис. 3.19. жения (3. !5) заменяют этими значениями. При этом не следует забывать, что эту нагрузку нужно умножить на отношение (t/p) согласно (3.16). Если на повер.хиости задана сосредоточенная сила, то к наружной грани граничного элемента нужно приложить силу, приходящуюся на единицу площади грани. При расчетах вибраций радиоконструкцнй внешние воздействия часто задают в виде граничных условий первого рода, т. е. в виде перемещений граничных узлов. Например, (При воспроизведении в расчете испытаний конструкции на внбростенде в точ,ках крепления ее к вибро-степду задаются такие же тгеремещеиия, как и у стола вибростеида. Если в таких местах расположить узлы модели-сетки иа поверхности тела, то перемещения узлов будут такими же, как и у moBepxHOCiTi. Таким образом, перемепення таких узлов не рассчитывают, а задают. Но мы условились, что на поверхность тела выходят поверхности граней элементов, а узлы располагаются ыа расстоянии половины шага сетки от поверхности. Это облегчает задание граничных условий второго рода. Как же быть, если в одной задаче встречаются граничные условия и первого и второго рода? Если граничные уч;ловня различны иа поверхностях (рнс, 3.19), то можно расположить узлы в тех местах, где задаются перемещения, и на расстоянии половины шага от поверхности, где задаются силы нли напряжения. Задача усложняется, если граничные условия первого и второго рода заданы на одной доверхиости. В этом случае стедует располагать узлы на расстоянии половины шага От нее и в тех местах, где заданы перемещения, переходить от перемещений к напряжениям, рассма тривая деформации гюловины элемента у поверхности. Однако при практических расчетах вибраций радио- инструкций таких усложнений можно всегда избежать, ебди рассмотреть реальные способы крепления конструкций к источнику вибраций. Как правило, такое крепление производится с помощью винтов или болтов, и если уж считать абсолютно жестким источник вибраций, то логично считать абсолютно жестким и :болт. В этом случае следует задавать о.тинаковые перемещения всем узлам, расположенным по оси -болта. При построении модели-сетки нужно только позаботиться о том, чтобы узлы располагались блил-е К осям болтов, через которые передаются вибрации на конструкцию. 3.8. Монолитный блок РЭА Мы рассмотрели построение дискретной модели для расчета вибраций однородных упругих тел прямоугольной формы или приближаюн1.ихся по форме к прямоугольному параллелептшсду. В радиоконструкциях такими телами можно считать различные аморфные подложки, например, из стекла или кера.мнки, на которые наносятся напылением или другими способами электрические эле.менты. Те же модели можно применять для расчетов колебаний различных литых или штампованньтх деталей ;корпусов, Кожухов и др. В радиоконструкциях часто .встречаются блоки, которые никак нельзя считать однородными с точки зрения их механических свойств. К ним относятся блоки, в которых промежутки между радиоэлементами залиты компаундом, пенопластом или резиной. Построение моделей для тэКИ блоков МОЖНО производить на основе тех же принципов, что и для однородных тел, если научиться вычислять средние значения механических харачтери-стик для неоднородных элементов моделей. Предположим, что иеобходи.мо рассчитать вибраиии неоднородного блока, содержаще!0 множество радио-, элементов, укрепленных на плата.ч, помещенных в кожух :и залитых компаундом (рис, 3.20). Блок имеет прямо-i угольную форму, поэтому модель будем строить в пря-моугольной системе координат, При построенин модели-сетки такого блока можно, например, твредставить его в виде нескольких однородных областей, соединенных границами сложной конфигу));!-Еиии, и для каждой области наметить ci5oro сетку. При 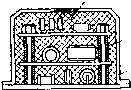 Рис, 3,20. расчетах процессов деформирования модели необходимо учесть граничные условия на границах областей с разными свойствами. Эти граничные условия формулируются достаточно просто: напряжения в различных материалах вблизи граничной поверхности, действующие в плоскости, касательной к поверхности, должны быть равны. Должны быть раъны и иеремешенил точек соседних областей вблизи границы. Однако та(кая попытка наталкивается на ряд трудностей, связанных с ограниченными возможностями вычислительных машин. Первая трудность определяется чрезмерно большим объемом памяти, необходимые! для хранения информации о движении такой модели. Ведь нужно будет хранить множество чисел, определяющих "движение каждого элемента модели. П1>скольку элементы маленькие, таких чисел наберется .много (около ми.тлио-на). Кроме того, потребуется указать элементы, сты-куго1цпеся между собой по границам, и определить, (К какой области этн элементы относятся. Это также потре-будет немалого объема памяти. Несмотря на то, что вычислительная техника в настоящее времярасполагает запоминэюшимн устройствами с объемом .памятн в несколько миллионов чисел, работать с такими большими маосивами чисел, когда каждое нз них потребуется в каждом таге вычислений по времени, очень сложно. Привлечение для хранения .информа.цни о состоянии модели внешних затго1МинагоЦ[.их устройств, таких, KaiK магнитные ленты, магнитные диски или барабаны, щ подобных задачах крайне нежелательно, поскольку это повышает время вычислений, но крайней мере, в Ю раз. А оперативная намять -машин ограничена и составляет несколько десятков тысяч чисел. Вторая трудность возникает в связи с ограниченным быстродействием машЕШ, Ведь в каждом шаге по времени надо вычислить поведегИ1е каждого элемента модели, т. е, выполнить для каждого элемента около сотни арифметических операций. А если таких элементов будет миллион н столько же шагов по времени, то потребуется около Ю* арифметических операций. Если даже щслительная машина выполняет в секунду миллион гераций, то на это ундет более трех лет. Очевидно, что гот путь неприемлем не только для современных вы-[слительных машин, но и для машин обоз(римого буду-(его. Можно пойти другим путем: использовать в расчете фуктурные особенности 1конструкцни. В радноконст-укциях, HaiHpHMep, встречается много плоских деталей [И сочленений таких деталей в виде илат, кожухов. !стречаются также сте!ржни в виде винтов, растяжек т. п. Процессы деформирования таких деталей доста-)чно хорошо изучены, что позволяет упростить Модель. (тот путь очеиь широко применяется при построении [азлнчных частных методик для расчета определенных онструкций. Мы в дальнейшем также прибегнем к одному такому приему для построения моделей плат и стержневых шструкц1нг Но и этот путь оказывается достаточно [ожным, если, помимо пластин и стержней, в конструк-1и еще много других деталей, влиянием которых на ход )0цес.са нельзя пренебречь, К таким деталям, прежде ;его, относится наполнитель, если его можно иазватт-;талью. Мы пойдем третьим путем. При построении МОдели /дем расчленять конструкцию на относительно большие 1ементи одинакового размера, независимо от того, что эти элементы попадает один материал или части раз-1чных деталей. Затем заменим каждый неоднородный 1емент однородным, обладающим в среднем теми же кханически.ми свонстиами. Механнческче свойства материалов можно опреде-[ить одним из даух наборов коэффициентов. Первый (лючаст в себя модуль Юнга Л и коэффициент Пуассо-V, второй -коэффициенты Ламе Я и Осреднение юйств элемента и сводтггся к вычислению средних зна-ший этих коэффзщиентов. Заметим, что осреднение ,1рактеристттки будет зависеть от направления, для ко->рого они вычисляются, т. е. осредненный элемент будет " [адать свойством анизотропии. 3.9, Элементы связей При построении моделей для однородных областей (делилась только одна группа элементов, в п;еитре ко-)ых сосредотачивалась масса элемента в виде узла Рис. 3,21, 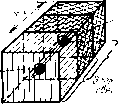 а молели-оетки. Эти элементы определяют инерционные свойства узла, т. е. правую часть в уравнениях движения. Величина напряжении, .Ьеменгп Д1Щих в левую часть уравнений, определяется деформацией других элементов, расположенных между узлами сетки. Эти элементы можно назвать элементами связей, В однородных областях выделять их не имело смысла, поскольку материал везде одииакоь, В ]1еод11ородных областях такое выделение повышает точность расчета. Рассмотрим вновь порядок составления уравнений движения. Вначале выделяют элементы массы н для них записывают уравнения диЕгамического равновесия через чппряжечнн. Зате.м напрнжения вьграл<;1Ют через дсфор-уаи,ии, а деформации - через перемсп1;ения. Рассмотрим нормальные напряжения дейстпуюн1.ие по фасад- ной грани элемента, имеющего форму параллелепипеда: 0+ (Я --1- 2ц) Е- 4- 4--Яс+-\ Деформации растяжения в находят через перемещения двух узлов с .координатами [х-К у, г) [i {х, z). Таки.м образом, за элемент овязи, определяющий растяжение в направлении х в центре фасадной грани, следует принять элемент, расположеииый между этими двумя узлами (рис. 3,21), и для него рассчитать осреднениое значение суммарного коэффициента (1Т2и). Деформации s" и вычисляются также в центре передней грани, однако при этом используются по четыре узла (рис. 3.22). Эти элементы связей имеют вдвое больший объем, и для них должны вычисляться остред-иениые значения двух коэффициентов Нужно (Позаботиться о новых обозначениях коэффициентов Ламе, поскольку в обозначении теперь должно указьшаться направление деформации, ее вид (растяжение или сдвиг) и грань элемента массы, для которой этот :лОэффициеит вычислен. Все эти у1казаиия содержатся в обозначениях деформацн:>, поэтому можно для > Э.пемеип! - пбязц 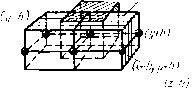 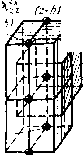 Рис, 3,22. коэффициентов Ламе принять те же индексы, что и для деформаций. Мы показали расположение и форму трех элементов связи для определения коэффициентов при вычислении нормальных напряже[1нй . К каждой грани э.демем- та массы приложено одно нормальное нааряжение. Поэтому для расчета всех шести напряжений потребуется определить 18 элементов связи. Причем все эти элементы будут разными. Однако напряжения на смежных гранях двух соседних эл(ментов одинаковы и определяются деформацией одинакового элемента связи, поэтому к каждому узлу можно отнести только девять элементов связи, а де(вять остальных- к соседни.-vi узлам. Уело-  Рис. Э.23, (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) ( 18 ) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) |
|
|