
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) ( 69 ) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (69) ~220В 50Гц о- Диодный мост Управляющий каскад идвн VT =hCa, Умножитель напряжения Датчик выходного напряжения  Нагрузка (импульсный источник питания) Датчик напряжения нагрузки Датчик тока Рис. 12.5. Типовая блок-схема электронного корректора коэффициента мощности 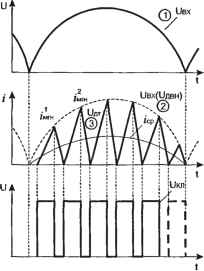 Рис. 12.6. График отражающий процессы, происходящие в импульсньпс корректорах коэффициента мощности личины (линия 2 на рис. 12.6). В начальный момент времени включается транзистор VT, и ток в индуктивности L начинает линейно нарастать. Это нарастание фиксируется датчиком тока (ДТ) и преобразуется в выходное напряжение (линия 3 на рис. 12.6). Индуктивность L выбирается таким образом, чтобы нарастание тока (и соответственно - нарастание тока в датчике тока ДТ) происходило значительно быстрее нарастания входного напряжения U Когда напряжение U. сравнивается с напряжением \J, управляющий каскад закрывает транзистор VT, и ток в цепи (теперь ток протекает исключительно через цепь VD, Сф, U„) падает по линейному закону до нуля. Момент падения тока до нуля служит сигналом для управляющего каскада на открытие транзистора VT, и процесс повторяется. Видно, что огибающая мгновенных значений токов (г],г„, if,H ••) повторяет по форме входное напряжение,а среднее значение тока i становится очень похожим на форму тока в активной нагрузке. Таким образом, фактически потребляемый ток носит характер постоянно следующих коротких импульсов переменной амплитуды. Этот несложный метод коррекции коэффициента мощности имеет и некоторые недостатки. Если входное напряжение U будет меняться, будет меняться и средний ток через нагрузку (поскольку будут меняться мгновенные значения импульсов тока). Изменение сопротивления нагрузки также будет менять выходное напряжение, так как разряд индуктивного элемента L в этом случае будет происходить медленнее или быстрее. «Плавающее» напряжение на выходе корректора потребует от разработчика импульсной схемы дополнительных мер по стабилизации напряжения на нагрузке (источнике питания ИП). Поэтому все современные активнью корректоры снабжаются дополнительными узлами стабилизации напряжения нагрузки. Изображенные на блок-схеме датчик напряжения нагрузки (ДНИ) вместе с усилителем ошибки (УО) являются системой, отслеживающей выходное напряжение корректора. С выхода датчика снимается напряжение ид„„. Умножитель (УН) перемножает сигналы \J„ и и„. Полученный сигнал управляет транзистором VT. Таким образом, в данной схеме можно «сдвигать» порог переключения транзистора VT, поддерживая постоянное напряжение на нагрузке. Ясно, что в структуре современного блока питания появляется еще одна микросхема, что, конечно, не способствует уменьшению габаритов источ- 2iJ и„ ника питания. Поэтому появились совмещенные микросхемы, в которых одна часть управляет корректором, а вторая -- импульсным источником (ML4819, К1033ЕУ6). В рамках этой книги мы не предусматриваем изготовление опытного образца корректора. Профессиональный разработчик при необходимости может обратиться, например, к [4], где подробно рассмотрены наиболее известные микросхемы МС33261, МС34261, МС34262, МС33368 производства фирмы Motorola. Некоторые фрагментарные теоретические сведения можно почепнуть из [20] и [23]. Чуть позже мы рассмотрим оригинальную схему корректора, выполненного на базе микросхемы TOP202YAI фирмы Power Integration, а сейчас получим основные расчетные соотношения, которые позволят пытливому читателю самостоятельно рассчитать корректор, выполненный практически на любой специализированной микросхеме. Еще раз вспомним, что корректор коэффициента мощности представляет собой бустерный преобразователь, работающий в режиме, пограничном с режимом разрывных токов. Следовательно, для пикового значения тока дросселя мы можем записать: . (t/„-t/„)(l-Y) Lf Когда мы рассматривали бустерную схему преобразователя, нам было ясно, что такое частота переключения / и какими параметрами схемы она определяется. Корректор же работает в режиме автогенерации с изменяющейся частотой и скважностью управляющих сигналов. Поэтому в качестве опорной частоты мы вынуждены принять среднюю частоту, которая указывается как рекомендуемая для расчетов в технических условиях на управляющую микросхему. Учитывая, что = 2г„, запишем: (,-t/„Xl-Y) Также мы должны иметь в виду, что = 1 - Y > (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) ( 69 ) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|