
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) ( 86 ) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (86) Р„ - суммарные потери тепла (на активном сопротивлении обмотки и в магнитопроводе); охл - площадь наружной поверхности трансформатора; а - коэффициент теплоотдачи (а= 1,2 10" Вт/см °С). После расчета трансформатора нужно провести выбор силовых элементов по допустимым значениям токов и напряжений, облегчить при необходимости тепловой режим с помощью теплоотводящих радиаторов. Очень важный вопрос, который сейчас необходимо рассмотреть, - это выбор схемы управления двухтактным импульсным источником. Не так давно все эти схемы приходилось проектировать на дискретных элементах, что рождало достаточно громоздкие и не слишком надежные решения. Микросборки, применяющиеся для управления однотактными схелами стабилизаторов и преобразователей, впрямую не годятся для использования в двухтактных схемах, поскольку HjoKHO иметь два парафазных выхода, управляемых одним генератором. Кроме того, микросхема должна содержать специальный узел для гарантированного ограничения у, чтобы не допустить аварийных ситуаций и сквозных токов. Желательно наличие дополнительных входов защитного отключения. В последнее время было разработано большое количество специализированных микросхем, в которых уже есть практически все необходимые узлы. Широко применяющаяся для управления блоками питания компьютеров типа IBM-PC микросхема TL494 (выпускается фирмой Texas Instruments, имеет отечественный аналог КР1114ЕУ1) подробно описана в доступной книге [54]. Как пример, рассмотрим не менее интересную микросхему СА1524 [53], выпускаемую фирмой Intersil. Эта микросхема содержит в своем составе цепи управления, контроля, нормально функционирует при питании от 8 до 40 В. Она может быть применена в составе любых схем стабилизаторов и преобразователей, описанных в этой книге. Основные узлы микросхемы (рис. 14.12): • термокомпенсированный опорный источник напряжения 5 В; • точный RC-генератор; • усилитель ошибки (разницы между требуемым напряжением нагрузки и реальным напряжением на выходе стабилизатора); компаратор схемы управления ключевыми транзисторами; усилитель ошибки по сигналу тока в первичной цепи; двухтактный выходной каскад, построенный на быстрых биполярных транзисторах; схема дистанционного управления включением/выключением. Опорное напряжение 58 Генератор Схема логики Триггер /VI :f Усилитель ошибки +58 -4> Компаратор +58 Усилитель ошибки по сигналу ограничения тока Рис. 14.12. Функциональные узлы микросхемы СА1524 фирмы Intersil Широтно-импульсное регулирование (ШИР) было рассмотрено нами в главе, посвященной чопперной схеме стабилизатора. В данном случае схема ШИР работает точно так же. Единственную особенность составляют триггер и схема логики, которые «маршрутизируют» управляющие импульсы, поочередно направляя их то на один выход (транзистор Sa), то на дрзтой (транзистор Sb). Триггер синхронизирован тактовыми импульсами с задающего генератора. Тактовые импульсы имеют некоторую длительность, которая служит для организации защитной паузы между выключением одного силового транзистора и включением второго. Таким образом, коэффициент заполнения не может быть более 0,45 (суммарное время паузы по двум выходам составляет 10%). Время паузы (dead time) можно регу- лироватъ, выбирая соответствующий номинал времязадающего конденсатора Ст. Частота работы задающего генератора определяется соотношением Rt и Ст (выбор этих элементов, показанных на рис. 14.13, осуществляется из графика, рис. 14.14). Можно заметить, что ощутимые значения времени паузы получаются при достаточно больших номиналах емкости Ст. Если элементы времязадающей цепи уже выбраны, «мертвое время» можно подрегулировать в пределах 0,5...5,0 МКС подключением конденсатора Cd к выводу 3, как показано на рис. 14.15. Величина этого ковденсатора находится в пределах 100... 1000 пФ. Однако такой способ разработчики схемы рекомендуют использовать только в крайнем случае. Рис. 14.13. Элементы частотозадающей цепи S S S X о о о" о о о о о о о 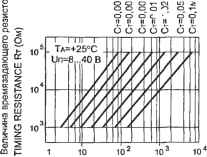 OSCILLATOR PERIOD. t(MKc) Период осцилляции задающего генератора Рис. 14.14. График выбора элементов времязадающей цепи Еще один способ регулирования dead time заключается в ограничении величины напряжения усилителя ошибки (рис. 14.16). Усилитель ошибки (выводы 1, 2, 9) имеет коэффициент усиления 80 dB (10000) и может быть снижен до необходимой величины включением резистора Rl между выводами 1(2) и 9 (в зависимости от того, прямая или инвертирующая схема включения используется разработчиком импульсного источника). Частота единичного усиления усилителя ошибки /, - 3 МГц. Разработчики микросхемы отмечают, что усилитель ошибки, не охваченный цепью обратной связи, имеет так называемый полюс передаточной характеристики в точке 250 Гц (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) ( 86 ) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) |
|
|