
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) ( 62 ) (63) (64) (65) (66) (67) (68) (62) кроме всех перечисленных аберраций, существует еще одна, не входящая в число ранее рассмотренных аберраций Зейделя, на которую необходимо обратить внимание, так как она может все качества оптической системы свести на нет. Это так называемая аберрация в зрачках или, точнее, сферическая аберрация выходного зрачка. Лучи, вошедшие в систему через входной зрачок, выходят через его изображение - выходной зрачок. Но главные лучи, т. е. лучи, проходящие через центр входного зрачка, обладают обычно большой сферической аберрацией, так как последняя полностью не исправляется. Вследствие этой аберрации поло- 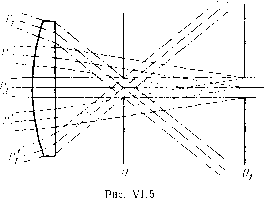 жение выходного зрачка не является постоянным, а меняется в зависимости от угла поля зрения w-. Обычно пучки, идущие под большими наклонами w-, пересекают ось гораздо ближе к окуляру, чем пучки, соответствующие центру поля (рис. Vl.5). Если диаметр зрачка глаза приблизительно равен диаметру выходного зрачка, что обычно и бывает, то при наличии большой аберрации в зрачках, как видно на рис. VI.5, нельзя найти такого положения для глазного зрачка, при котором в глаз могли бы попасть все лучи всех пучков. Например, в положении О в глаз попадают все лучи из края поля зрения (пучок Pj), но лучи из середины поля (пучок Ра) в глаз вовсе не попадут, и только осевой пучок (центр поля зрения) опять целиком заполняет глаз. В результате наблюдатель увидит в поле зрения темное кольцо, соответствующее какой-то средней зоне поля. В положении Oj в глаз попадут лучи из пучков Ра и Рз, но пучок Pi и близкие к нему либо вовсе не попадут, либо попадут только частично. Наблюдатель не увидит края поля. Какое бы место глаз ни занимал, всегда какая-либо часть поля окажется либо вовсе темной, либо отчасти затемненной. Во избежание этого недостатка необходимо исправить аберрацию в зрачках до такой степени, чтобы ни один из пучков не оказался заметно виньетированным, за исключением краевого пучка, где виньетирование всегда имеет место и где его не удается избежать в действительности. В микроскопах, как правило, аберрации после выхода лучей из окуляра значительно больше, чем в телескопических системах. В центре поля зрения нередко можно встретить сферическую и хроматическую аберрации порядка 10 и более; но именно в случае микроскопов обнаруживается, что для оценки качества системы недостаточно вычислить поперечные аберрации. Переход к волновым аберрациям (см. гл. X) позволяет получить более точный способ оценки. Аберрации фотографических объективов должны рассматриваться также с точки зрения дифракционной теории изображения, и вопросы о разрешающей силе фотообъективов решаются исключительно на основании этой теории. Однако во многих случаях картина геометрических (продольных и поперечных) аберраций дает вполне достаточный для оценки качества системы материал. Обычно считают, что если изображение точки, даваемое фотографическим объективом, не превышает по своим размерам 0,03- 0,05 мм для нормальных снимков, не подлежащих дальнейшему увеличению, или 0,01-0,03 мм для снимков короткофокусными объективами, подлежащих увеличению, то коррекция объектива доведена до достаточной степени совершенства. Впрочем, весьма малочисленны объективы, удовлетворяющие для всего поля этим условиям. Чаще всего качество изображения быстро убывает с удалением рассматриваемой точки от оси симметрии фотографического объектива. 5. НАХОЖДЕНИЕ ЭЛЕМЕНТОВ ОКОНЧАТЕЛЬНОЙ СИСТЕМЫ Как указывалось, результаты тригонометрического контроля хода лучей через оптическую систему с конечными толщинами обычно не удовлетворяют всем поставленным условиям: величины аберраций получаются не те, которые задавались. Это вызывается приближенностью методов решения аберрационных уравнений, влиянием толщин и пренебрежением аберрациями высших порядков. В каждом отдельном случае можно определить долю каждой из этих причин в полученном расхождении; однако ради экономии времени и труда целесообразно исправить все остаточные аберрации независимо от причин, вызвавших их появление. Условимся понимать под исправлением аберрации не полное их уничтожение, чего достигнуть нельзя, а уменьшение до некоторых заданных величин, вполне определенных для каждого типа системы; всякие стремления к дальнейшему уменьшению приводят к бесполезной потере времени. Такие предельные значения для тех или иных аберраций были отчасти указаны в предыдущем параграфе; более подробные сведения может дать только продолжительный опыт. Исправление аберраций достигается небольшими изменениями конструктивных элементов системы. Можно указать на два основных метода изменения; кроме того, естественно применять и комбинированные приемы. Наиболее рациональным нужно считать метод изменения основных параметров без изменения внешних элементов системы; этот метод является естественным продолжением изложенного в гл. HI метода расчета. Для определения численных значений необходимых изменений делается предположение, что при небольших изменениях основных параметров (как, впрочем, и всяких других) влияние аберраций высши.х порядков и толщин остается практически неизменным и что изменяются главным образом аберрации третьего порядка. Сначала определяем разность А {8g) между желаемым значением аберрации и тем значением, которое получено из тригонометрического расчета; далее применяем одну из формул (VI. 1), (VI.2) или (VI.3), имеющих общий вид 8g,= f{mu МГ, (VI.67) где к условно обозначает название аберрации; 5 - сумма Зейделя бесконечно тонкой системы, соответствующая данной аберрации; f (nii, М, Wj) - известная функция от координат луча. Дифференцируя формулу (VI.67) и заменяя дифференциалы конечными приращениями, на основании сделанного предположения получаем A8gK = f{mu Ми Wi)ASk. (VI.68) Поступая таким образом для всех аберраций, принятых во внимание в первом приблинчснин, находим все изменения сумм Sj, . . ., Sy и хроматических сулгм п Su . По новым значениям сумм с помощью формул (11.47) можно вычислить новые значения основных параметров Р,- и W,-, считая я,- постоянным. Переход от основных параметров к конструктивным элементам производится на основании тех соотношений, которые связывают радиусы и показатели преломления стекол с основными параметрами и рассмотрены в гл. III для большинства применяемых комбинаций: простых, двухлинзовых склеенных и несклеенных и трехлинзовых склеенных систем. Например, для двухлинзового склеенного объектива было доказано существование следующих приближенных соотношений: P = P„„„ + 2,35(Q-Qo); W = 0,15-1,67 (Q-Q„), позволяющих по новым значениям Р и W получить новые значения Pn,in и Qo- Если изменения, полученные для значительны, может оказаться необходимым изменить и сорта стекол. Использование в качестве переменных, подлежащих изменению, основных параметров, наряду с теоретическими преимуществами, обладает некоторыми недостатками, главным из которых является необходимость заново рассчитывать конструктивные элементы всей системы и производить заново тригонометрический (VI. 69) расчет по совершенно новым данным. Поэтому наравне с этим методом рационально применять для нахождения элементов окончательной системы другой метод, аналогичный по своему характеру упомянутому в начале главы методу проб и служащий естественно его продолжением. Из параметров, определяющих конструктивные элементы системы, подбирается некоторое число таких, которые, с одной стороны, оказывают заметное влияние на аберрации, подлежащие изменению, и, с другой стороны, требуют минимальной дополиительной работы по расчету хода лучей через измененную оптическую систему. Нельзя дать общих указаний относительно выбора этих параметров, так как в каждом отдельном случае требуется особый подход. Лишь большой опыт позволяет с достаточной уверенностью остановиться на тех или иных переменных, причем этот выбор должен по мере возможности опираться на теорию основных параметров. В качестве практически удобных переменных люжно назвать радиусы кривизны (или, лучше, обратные им величины, т. е. кривизны поверхностей), воздушные расстояния, сорта стекол; в случае, когда толщины линз заметно влияют на аберрации, следует и их ввести в число переменных. Л\ожно, наконец, комбинировать оба метода нахождения окончательной системы. Переменные, подлежащие изменению, делят на две группы. К первой группе относят параметры, связь которых с аберрациями третьего порядка сохраняет простой вид также и для оптических систем с конечными толщинами компонентов, например оптические силы ф, действующие преимущественно на хроматические аберрации. Ко второй группе относят параметры более или менее случайного характера, о влиянии которых на аберрации известно на основании опыта или тригонометрических расчетов хода лучей. Какой бы нз трех указанных методов ИИ был применен, не всегда удается после первого же изменения параметров получить достаточно хорошо исправленные аберрации. Давая переменным новый ряд значений, рассчитывают новые конструктивные элементы оптической систелш! и вычисляют ее аберрации; сравнивая их с аберрациями первых двух систем, путем интерполяции получают окончательные значения выбранной системы переменных. Иногда приходится рассчитывать довольно большое число промежуточных систем; в этой стадии работы особенно важную роль играют опыт, умение выделять влияние отдельных параметров и комбинировать наилучшим образом их изменения. Система, давшая удовлетворительные значения аберраций, исследуется весьма подробно в отношении всех ее аберраций; со-:тавляется сводка аберраций, и чертятся графики последних согласно общепринятым правилам. Окончательная оценка может быть произведена только на основании дифракционной теории изображения. ГЛАВА VII МЕТОДЫ АВТОМАТИЧЕСКОГО РАСЧЕТА ОПТИЧЕСКИХ СИСТЕМ 1. ВВЕДЕНИЕ Использование электронных быстродействующих машин для расчета оптических систем обусловило развитие новых методов расчета, учитывающих специфику этих машин. Помимо высокой скорости работы электронные вычислительные машины обладают рядом особенностей, благодаря которым оказывается возможной автоматизация сложнейших научных и инженерных расчетов, в том числе расчетов оптических систем. Важнейшими из .этих особенностей являются следующие: 1. Управление машиной в процессе выполнения расчетов осуществляется автоматически с помощью программы. Программа представляет собой последовательность команд, определяющих действия машины в течение некоторого времени. 2. Направление вычислительного процесса можно изменять автоматически в зависимости от получаемых промежуточных результатов. 3. В устройстве, называемом памятью машины, может храниться большой объем чисел, представляющих собой исходные данные, программу и промежуточные результаты вычислений. При выполнении расчетов хода лучей на современных электронных вычислительных машинах, вообще говоря, могут быть использованы обычные тригонометрические формулы. Однако, как правило, в этом случае на расчет затрачивается больше времени, чем при использовании нескольких преобразованных формул, в которых переход от углов к тригонометрическим функциям и обратно исключен путем введения радикалов. Это объясняется тем, что на нахождение синуса и, главным образом, арксинуса машины тратят больше времени, чем на извлечение квадратного корня. В остальном расчет хода лучей, выполняемый на машине, принципиально не отличается от обычного тригонометрического расчета, выполняемого вручную. Но, несмотря на отсутствие принципиальных трудностей, составление удобной в эксплуатации программы для массового расчета хода лучей является трудоемким и кропотливым делом. Однако затраты на составление программы окупаются чрезвычайно быстро, так как одна и та же программа используется годами и по ней выполняются тысячи расчетов. Выполнение расчетов хода лучей с помощью машин позволяет ускорить вычисления в сотни и тысячи раз и обеспечивает получение большой экономии. В качестве примера можно указать, что даже обладающая относительно малой скоростью машина «Урал-2» выполняет расчет хода луча через одну поверхность в среднем за одну пятнадцатую долю секунды, в то время как высококвалифицированный вычислитель затрачивает на это около трех минут. Стоимость расчета луча через одну поверхность на этой машине не превышает 0,15 коп., а при ручном выполнении расчетов она составляет около 5 коп. Передача машинам функций тригонометристов несколько ускоряет процесс разработки оптических систем, но в общем дает незначительный выигрыш во времени. Существенное ускорение может быть достигнуто лишь в случае передачи машине хотя бы части функций конструктора оптической системы, а именно функций по определению численных значений конструктивных параметров системы, обладающей заданными свойствами. Разработка любой оптической системы в общем случае состоит по крайней мере из двух этапов, первый из которых заключается в определении принципиальной конструкции оптической системы, т. е. в выборе количества линз (зеркал), их формы, взаимного расположения. Второй этап заключается в определении численных значений конструктивных параметров, при которых выбранная на первом этапе система обладает заданными свойствами. До настоящего времени не было сделано серьезных попыток автоматизировать процесс выбора конструкции оптической системы. Этот процесс плохо поддается формализации и пока еще не может быть представлен в виде алгоритма, т. е. в виде системы формальных правил, четко и однозначно определяющих выполнение заданной работы. Нахождение численных значений конструктивных параметров для выбранной конструкции оптической системы как при неавтоматическом, так и при автоматическом выполнении работы может быть осуществлено двумя принципиально различными путями. jBo-первых, могут использоваться методы универсального характера, основанные на различных способах постепенных приближений и применимые к системам любого типа и любой степени сложности. Такие методы, хорошо известные и при неавтоматическом выполнении работы, носят название методов проб. При использо-,вании таких методов необходимо иметь некоторые числовые значения конструктивных параметров оптической системы, принимае-1юй за исходную. Эти значения могут быть выбраны более или *!енее произвольно либо определены на основании предварительных расчетов, например расчетов в области аберраций третьего порядка. Во-вторых, могут использоваться методы, основанные на решении систем уравнений, связывающих конструктивные параметры системы с аберрациями. Такого рода уравнения удается составить, к сожалению, только для области третьих порядков (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) ( 62 ) (63) (64) (65) (66) (67) (68) |
|
|