
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) ( 107 ) (108) (109) (110) (111) (112) (113) (114) (115) (116) (117) (118) (119) (120) (121) (122) (123) (124) (107) I ву I I no вп I [snm] пк при пппд ni A Чт Чт Чу ЛТ V W.ff \АКК\ БСОУ 1 £ Рис. 8-4. Двухпроцессорная конфигурация СЧПУ осуществлять другой процессор, и система будет работать с пониженным, но допустимым уровнем качества. Число процессоров в системе можно увеличить при дальнейшей декомпозиции функций. Так, например, функции процессора П1 можно распределить между двумя процессорами, один из которых будет выполнять ввод информации, ее упаковку и предварительную обработку, а второй - подготовку данных. Проблемная ориентация процессоров для СЧПУ. Проблемная ориентация процессора определяется специализацией его аппаратурных и программных средств н производится для более эффективной реализации функций в системе. Как следует нз приведенных алгоритмов, основными функциями, реализуемыми в системе, являются ввод информации (Начало ввод строки Подготовка данных. ПД-1 ) (Начало Останов 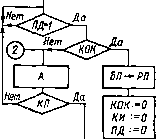 (Останов) Q) Рис, 8-5. Алгоритмы функционирования двухпроцессорной системы) а-алгоритм работы процессора П1; б--алгоритм работы процессе ра П2 в память БППОД и ее упаковка; подготовка данных; интерполяция;, реализация технологических команд; индикация. Рассмотрим важнейшие пути специализации аппаратурных н программных средств, ориентируясь на перечисленные функции. Информация вводится побайтно, что определяет байтовую организацию процессора. Поскольку процедура ввода не изменяется в зависимости от ориентации СЧПУ на конкретное оборудование, то ее целесообразно реализовать на микропрограммном уровне. Это требует, во-первых, микропрограммного доступа к ячейкам БППОД, во-вторых, гибкого маскирования разрядов байта, в-третьих, достаточно большой микропрограммной памяти. Желательно введение микроииструкций, отражающих характер алгоритма преобразования, например перестановки тетрад в байте, установки и сброса флажков и т. п. Для подготовки данных используются операнды длиной в 3 байта. Следовательно, обработка может выполняться последовательно-параллельно (побайтно) или параллельно (в зависимости от требований по быстродействию). По этой причине структура процессора должна обеспечивать наращивание разрядности. Для упрощения программирования и отладки алгоритмов по подготовке даииых и интерполяции целесообразно названные алгоритмы реализовать иа программном уровне, что также гарантирует преемственность разработок и инвариантность пч« кета прикладных программ элементной базе. При использовании в системе блока БУП без кодового приема информации для управления приводом требуется цифровой интегратор, разрядность которого определяется разрядностью рассчитанного приращения. В свою очередь, эта разрядность зависит от длительности вычислительного цикла, а также от максимальной скорости обработки данных в системе. Технологические команды выполняются в соответствии с реализацией логических алгоритмов посредством функционирования релейно» контактных блоков технологического оборудования. Замена ненадежных и занимающих большой объем релейиЬ-коитактиых блоков табличными или таблично-алгоритмическими процессорами, на основе интегральной памяти с логическим характером обработки информация значительно повышает регулярность СЧПУ в целом, ее надежность н эффективность. Индикация результатов производится путем вывода информации, необходимой оператору, на отображающие элементы (возможно также преобразование информации из одной системы счисления в другую). Для выполнения подобных функций, не зависящих от времени и других функций, целесообразно иметь в сжтеме специализированные процессоры (в большинстве случаев таблично-алгоритмические). t Организовать вычислительные средства для СЧПУ с удовлетворением перечисленных требований позволяет подход, основанный иа наиболее полном использовании функциональных возможностей памяти, а T4je многофункциональных модулей с регулярной структурой для по-ст)оения алгоритмических структур. Реализация модулей в виде БИС дат основание говорить о микропроцессорных структурах, что определяет прежде всего конкретную техническую реализацию вычислительной структуры. Примером такого рода структур является семейство БИС К589. Микропроцессорные регулярные структуры позволяют не только компоновать процессор нужной структуры и архитектуры и тем самым проблемно ориентировать его, но и использовать отдельные модули для реализации других блоков (например, блоков МИ й БУП). Указанный подход дает возможность в конечном счете организовать СЧПУ иа двух типах модулей: памяти и микропроцессорной БИС. в заключение следует отметить также, что построение СЧПУ на основе микропроцессорных регулярных структур соответствует наблюдаю-шейся теидеицни к модульной конструкции системы, что упрощает изменение ее функций н показателей, размещение относительно объекта управления!, профилактику и ремонт, улучшает теплоотвод. Структура программного обеспечения и автоматизация его Проектирования в системах программного управления. Массовое производство микропроцессоров и микропроцессорных наборов изменило принципы организации аппаратурных средств систем программного управления (ПУ), что позволило расширить список реализуемых функций. Внедрение универсальных вычислительных средств обусловливает в первую очередь разработку развитого программного обеспечения для эффективной эксплуатации систем ПУ. ! Прн управлении технологическим оборудованием в системе рУ реализуются следующие функции: загрузка с предварительной упаковкой программы обработки детали; редактирование и хранение программы обработки деталей; подготовка [даиных для вывода на технологическое оборудование; вывод определенных порций информации ца технологическое оборудование по мере обработки; анализ состояния технологического оборудования и формирование соответствующих признаков; контроль н учет состояния органов управления на пультах оператора, наладчика, технолога-программиста; управление логикой станка; учет погрешностей кинематики стайка и износа инструмента; связь с ЭВМ высшего ранга (если необходимо). Программное обеспечение современной системы ПУ, реализующей перечисленные функции, должно отвечать следующим требованиям: обеспечивать проблемную ориентацию аппаратурных средств системы; отвечать принципам совместимости и преемственности в семействе систем ПУ на основе МП; обеспечивать повышенную надежность системы; структура ПО должна отвечать модульному принципу, упрощающему модернизацию системы. Приведенные перечни функций и" требований могут уточняться в зависимости от назначения системы, однако они определяют типовой вариант структурной схемы ПО (рнс. 8-6). Служебные подпрограммы (ПП) включают в себя загрузчик, редактор и библиотекарь. Загрузчик выполняет ввод кадра программы (или всей программы) в буферную (или общую оперативную) память, осуществляя одновременно сжатие программы. Редактор служит для редактирования введенной программы. При этом должны обеспечиваться стирание, замена, вставка отдельных слов или кадров. Библиотекарь осуществляет подключение стандартных ПП в процессе функционирования системы. Подпрограммы организации вычислительного процесса, входящие в операционную систему, должны обеспечивать эффективное фуикционнрованне системы ПУ различной конфигурации в заданном режиме работы. Эти подпрограммы должны обеспечивать работу системычийк в однопрограммиом, так и в многопрограммном режиме (прн упршве-нии сложным технологическим комплексом, оснащенным, напрйшр, роботами). Подпрограмма начального пуска предназначена для «№)№-вода системы нз исходного состояния в заданный с пульта оператбр)ем режим работы. Она осуществляет сброс необходимых регистров МП, ввод констант, начальный контроль блоков системы н передачу управления диспетчеру. Диспетчер определяет стратегию, работы системы, контролируя работу устройства прерывания, а затем передает управление супервизору, который определяет порядок выполнения подпрограмм в зависимости от режима рабскгы, установленного диспетчером, (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) ( 107 ) (108) (109) (110) (111) (112) (113) (114) (115) (116) (117) (118) (119) (120) (121) (122) (123) (124) |
|
|