
|
|
| Главная -> Книги (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (111) (112) ( 113 ) (114) (115) (116) (117) (118) (119) (120) (121) (122) (123) (124) (113) ; На быстродействие МПС оказывает влияние несоответствие разрядности процессора н обрабатываемых данных прн выполнении некоторых функций. Например, поиск синхросигнала требует выполнение логических операций над кодами разрядностью 20-30 бит, что приводит к последовательно-параллельной обработке их на 8- или 16-битных МП. Увеличение же разрядности МП при использовании секционных процессорных элементов типа К584, К589 нецелесообразно, так как другие функции используют операнды значительно меньшей разрядности (6-8 бит). Широкий диапазон требований к системе связи по таким характеристикам, как скорость передачи информации, тнп используемых помехоустойчивых кодов, число каналов связи, требует разработки семейства МПС, удовлетворяющих заданным требованиям. Структурная схема МПС для абонентского пункта системы связи представлена на рнс. 8-12. Входной и выходной регистры выполняют функции последовательно-параллельного н параллельно-последовательного преобразования информации, принимаемой н передаваемой соответственно в канал связи. Память данных используется для временного хранения служебного поля кадра принимаемой н передаваемой информации. МПС работает в мультипрограммном режиме н реализует все функции программным путем, время ввода н вывода кодов с регистров ограничено периодом поступления битов кадра. Рассмотрим подробно реализацию двух типичных функций: фазирования по циклам и кодирования-декодирования информации. Подпрограмма установления и контроля синхронизма реализует этапы вхождения в синхронизм и последующий его контроль. Условия вхождения в синхронизм могут быть различными, например правильный прием фазирующей комбинации в к последовательно принятых кадрах. Срыв синхронизации фиксируется в случае непрнема определенной комбинации сигналов фазового пуска (ФП) в m последовательно принятых кадрах. Сложность синхронизации определяется этими условиями. Однако наибольшие затраты времени происходят на приеме ФП, т. е. прн определении, является ли входная -комбинация совпадающей с эталон- К телетайпу 1 Микро процессор Шина данных
Шиьа адреса Шина управ- Регистр адреса Блок таймеров Блок приоритетных прерываний t t-t Запросы прерываний Схема сопряжения Схема сопряжения Входной регистр К пульту К радиотехничес оператора <°"V комплексу (РТК) От РТК Выходной регистр К РТК 3anpocbt прерываний Рис. 8-12. Структурная схема МПС абонентского пункта системы связи 942 ным ФП. Например, комбинация ФП имеет длину 1 бит и условие прд* внльного приема -наличие не более г ошибок при сравнении с эта* лоном. Дополнительной трудностью при реализации такой подпрограм* мы является несовпадение длины ФП и разрядности микро-ЭВМ, также последовательная побитная обработка кода. После определения первой фазирующей комбинации посредством побитного просмотр* поступающей нз РТК информации и сравнения с эталоном ФП запу* скается таймер для отработки времени Л<, равного длительности кадра. После срабатывания таймера во входном регистре находится предпо« латаемый код ФП следующего кадра. Такое решение позволяет не просматривать на наличие ФП все поле кадра, так как существует вероятность ложного обнаружения комбинации фазового пуска, т. е. потери сннхроннзацнн приема кадров. В целях повышения достоверности приема и передачи кадров заголовок каждого из ннх, как правило, передается в помехоустойчивом коде. Процедура декодирования служебного поля, например, при использовании кода БЧХ сводится к делению одного многочлена на другой. Остаток от деления при кодировании является проверочным многочленом, а прн декодировании - синдромом ошибок. Равенство синдрома ошибки нулю соответствует отсутствию ошибок. Операция деления сводится к сдвигам и суммированию по mod 2 делимого и делителя. МП выполняет операции декодирования заголовка принимаемых кадров и кодирования запросного сообщения. Таким образом, реализация функций сннхроннзацнн, кодирования, декодирования не требует выполнения команд умножения, деления (доля команд сложения н вычитания тоже мала, менее 8 %), а сводится к таким командам, как логические, команды передачи, управления. После декодирования служебного поля выполняется его дешифрация, целью которой является определение адреса абонента, кода несущей вызывного канала, типа команды, вида канала, приоритета сообщения и других признаков. В табл. 8-4 приведен процентный состав команд для выполнения функций абонентского пункта, а в табл. 8-5 - сравнительные характеристики программных модулей данных функций для МП КР580 н К589. Для МП К589 время микрокомандного цикла составляет 300 не, формат микрокоманды (4 байта) содержит помимо обязательных по- Таблица 8-4 Состав команд для реализации функций абонентского пункта
лей поле маски и управляющих сигналов. На основании полученных результатов при проектировании МПС иа основе двух вариантов МП можно сделать следующие выводы; системы команд МП КР580 и К589 йвляются избыточными для реализации задач системы связи; средняя скорость при реализации МПС на основе рассмотренных микропроцессоров составляет 1,2К и 9,6К бод для МП КР580 н МП К589 соответ-етвеино; объем программной памяти составляет 1600 байт для МПС иа. основе КР580 и около 3500 байт для МПС на основе К589. Q Начало Определешче набора реализуемых МПС функций, структуры данмых, состава периферийных устройств, скорости передачи информации в каналах связи 1-2- Раработка алгоритмов функций и критериев оценки структур. Определение базового набора опереторов и трудоемкости реализации функций г-3- Выбор базовой структуры МПС * Определение требуемой производительности МП&. Разработка функционально-временной диаграммы алгоритма. Олраделение 0 длп выделенных интервалов и Построение графика распределения р по длине кадра. Вычисление W = PmcV 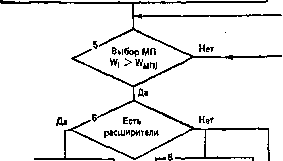 Разработка расшири телей, программных и аппаратных федств МПС Разоаботка nporpaMNih ных и аппаратных средств МПС Q Конец J Рис. 8-13. Этапы проектирования МПС системы связи (0) (1) (2) (3) (4) (5) (6) (7) (8) (9) (10) (11) (12) (13) (14) (15) (16) (17) (18) (19) (20) (21) (22) (23) (24) (25) (26) (27) (28) (29) (30) (31) (32) (33) (34) (35) (36) (37) (38) (39) (40) (41) (42) (43) (44) (45) (46) (47) (48) (49) (50) (51) (52) (53) (54) (55) (56) (57) (58) (59) (60) (61) (62) (63) (64) (65) (66) (67) (68) (69) (70) (71) (72) (73) (74) (75) (76) (77) (78) (79) (80) (81) (82) (83) (84) (85) (86) (87) (88) (89) (90) (91) (92) (93) (94) (95) (96) (97) (98) (99) (100) (101) (102) (103) (104) (105) (106) (107) (108) (109) (110) (111) (112) ( 113 ) (114) (115) (116) (117) (118) (119) (120) (121) (122) (123) (124) |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|